|
Prusa MINI Firmware overview
|
#include <configuration_store.h>
Marlin 3D Printer Firmware Copyright (c) 2019 MarlinFirmware [https://github.com/MarlinFirmware/Marlin]
Based on Sprinter and grbl. Copyright (c) 2011 Camiel Gubbels / Erik van der Zalm
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.
◆ datasize()
| uint16_t MarlinSettings::datasize |
( |
| ) |
|
|
static |
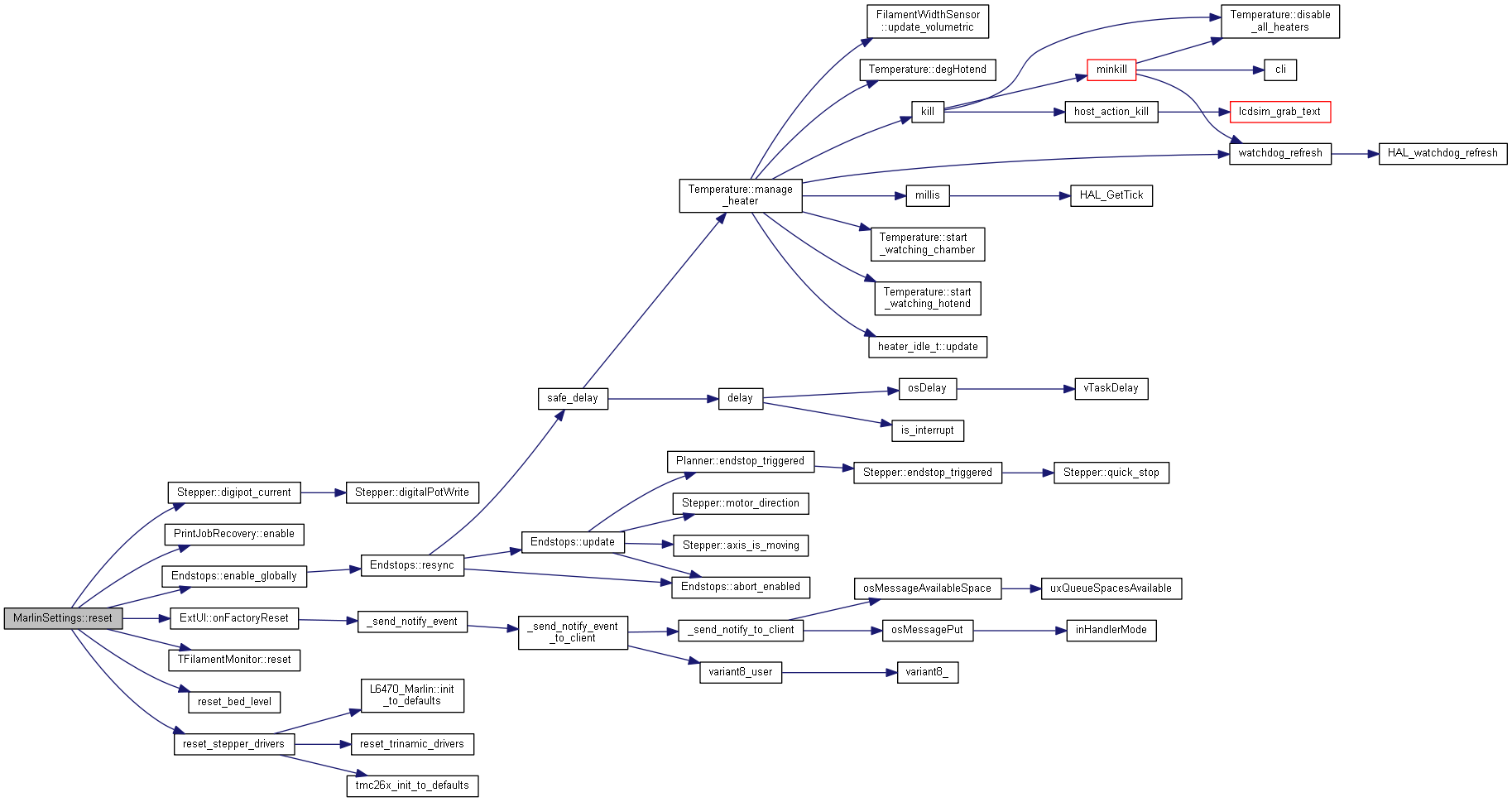
◆ reset()
| void MarlinSettings::reset |
( |
| ) |
|
|
static |
M502 - Reset Configuration
2222 #if HAS_CLASSIC_JERK
2223 #ifndef DEFAULT_XJERK
2224 #define DEFAULT_XJERK 0
2226 #ifndef DEFAULT_YJERK
2227 #define DEFAULT_YJERK 0
2229 #ifndef DEFAULT_ZJERK
2230 #define DEFAULT_ZJERK 0
2232 planner.max_jerk.set(DEFAULT_XJERK, DEFAULT_YJERK, DEFAULT_ZJERK);
2233 #if HAS_CLASSIC_E_JERK
2238 #if DISABLED(CLASSIC_JERK)
2239 planner.junction_deviation_mm = float(JUNCTION_DEVIATION_MM);
2242 #if HAS_SCARA_OFFSET
2243 scara_home_offset.reset();
2244 #elif HAS_HOME_OFFSET
2245 home_offset.reset();
2248 #if HAS_HOTEND_OFFSET
2249 reset_hotend_offsets();
2256 #if HAS_FILAMENT_SENSOR
2259 #ifdef FILAMENT_RUNOUT_DISTANCE_MM
2260 runout.set_runout_distance(FILAMENT_RUNOUT_DISTANCE_MM);
2269 #if ENABLED(TOOLCHANGE_FILAMENT_SWAP)
2270 toolchange_settings.swap_length = TOOLCHANGE_FIL_SWAP_LENGTH;
2271 toolchange_settings.extra_prime = TOOLCHANGE_FIL_EXTRA_PRIME;
2272 toolchange_settings.prime_speed = TOOLCHANGE_FIL_SWAP_PRIME_SPEED;
2273 toolchange_settings.retract_speed = TOOLCHANGE_FIL_SWAP_RETRACT_SPEED;
2275 #if ENABLED(TOOLCHANGE_PARK)
2276 constexpr
xyz_pos_t tpxy = TOOLCHANGE_PARK_XY;
2277 toolchange_settings.change_point = tpxy;
2279 toolchange_settings.z_raise = TOOLCHANGE_ZRAISE;
2282 #if ENABLED(BACKLASH_GCODE)
2286 #ifdef BACKLASH_SMOOTHING_MM
2287 backlash.smoothing_mm = BACKLASH_SMOOTHING_MM;
2291 #if ENABLED(EXTENSIBLE_UI)
2299 #if ENABLED(MAGNETIC_PARKING_EXTRUDER)
2300 mpe_settings_init();
2307 #if ENABLED(ENABLE_LEVELING_FADE_HEIGHT)
2308 new_z_fade_height = 0.0;
2316 #ifndef NOZZLE_TO_PROBE_OFFSET
2317 #define NOZZLE_TO_PROBE_OFFSET { 0, 0, 0 }
2320 static_assert(
COUNT(dpo) == 3,
"NOZZLE_TO_PROBE_OFFSET must contain offsets for X, Y, and Z.");
2328 #if ENABLED(EDITABLE_SERVO_ANGLES)
2329 COPY(servo_angles, base_servo_angles);
2344 const abc_float_t adj = DELTA_ENDSTOP_ADJ, dta = DELTA_TOWER_ANGLE_TRIM;
2353 #elif EITHER(X_DUAL_ENDSTOPS, Y_DUAL_ENDSTOPS) || Z_MULTI_ENDSTOPS
2355 #if ENABLED(X_DUAL_ENDSTOPS)
2357 #ifdef X_DUAL_ENDSTOPS_ADJUSTMENT
2358 X_DUAL_ENDSTOPS_ADJUSTMENT
2364 #if ENABLED(Y_DUAL_ENDSTOPS)
2366 #ifdef Y_DUAL_ENDSTOPS_ADJUSTMENT
2367 Y_DUAL_ENDSTOPS_ADJUSTMENT
2373 #if ENABLED(Z_DUAL_ENDSTOPS)
2375 #ifdef Z_DUAL_ENDSTOPS_ADJUSTMENT
2376 Z_DUAL_ENDSTOPS_ADJUSTMENT
2381 #elif ENABLED(Z_TRIPLE_ENDSTOPS)
2383 #ifdef Z_TRIPLE_ENDSTOPS_ADJUSTMENT2
2384 Z_TRIPLE_ENDSTOPS_ADJUSTMENT2
2390 #ifdef Z_TRIPLE_ENDSTOPS_ADJUSTMENT3
2391 Z_TRIPLE_ENDSTOPS_ADJUSTMENT3
2404 #if HOTENDS && HAS_LCD_MENU
2417 #if ENABLED(PIDTEMP)
2422 #if ENABLED(PID_EXTRUSION_SCALING)
2432 #if ENABLED(PID_EXTRUSION_SCALING)
2440 #if ENABLED(PIDTEMPBED)
2450 #if HAS_USER_THERMISTORS
2458 #if HAS_LCD_CONTRAST
2459 ui.set_contrast(DEFAULT_LCD_CONTRAST);
2466 #if ENABLED(POWER_LOSS_RECOVERY)
2474 #if ENABLED(FWRETRACT)
2482 #if DISABLED(NO_VOLUMETRICS)
2484 parser.volumetric_enabled =
2485 #if ENABLED(VOLUMETRIC_DEFAULT_ON)
2497 #
if ENABLED(ENDSTOPS_ALWAYS_ON_DEFAULT)
2510 #if ENABLED(LIN_ADVANCE)
2512 planner.extruder_advance_K[
i] = LIN_ADVANCE_K;
2513 #if ENABLED(EXTRA_LIN_ADVANCE_K)
2514 saved_extruder_advance_K[
i] = LIN_ADVANCE_K;
2523 #if HAS_MOTOR_CURRENT_PWM
2524 constexpr uint32_t tmp_motor_current_setting[3] = PWM_MOTOR_CURRENT;
2533 #if ENABLED(CNC_COORDINATE_SYSTEMS)
2534 (
void)
gcode.select_coordinate_system(-1);
2541 #if ENABLED(SKEW_CORRECTION_GCODE)
2543 #if ENABLED(SKEW_CORRECTION_FOR_Z)
2553 #if ENABLED(ADVANCED_PAUSE_FEATURE)
2555 fc_settings[e].unload_length = FILAMENT_CHANGE_UNLOAD_LENGTH;
2556 fc_settings[e].load_length = FILAMENT_CHANGE_FAST_LOAD_LENGTH;
2565 #if ENABLED(EXTENSIBLE_UI)
◆ save()
| bool MarlinSettings::save |
( |
| ) |
|
|
static |
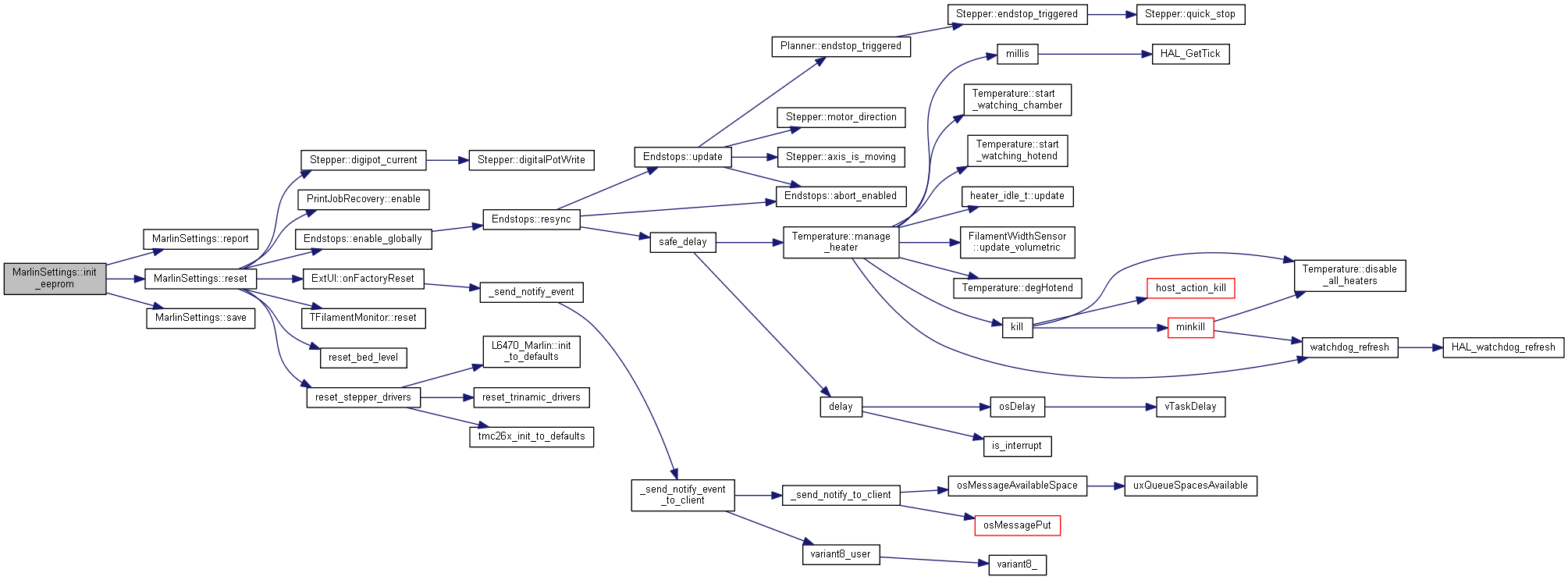
◆ init_eeprom()
39 #if ENABLED(EEPROM_SETTINGS)
40 const bool success =
save();
41 #if ENABLED(EEPROM_CHITCHAT)
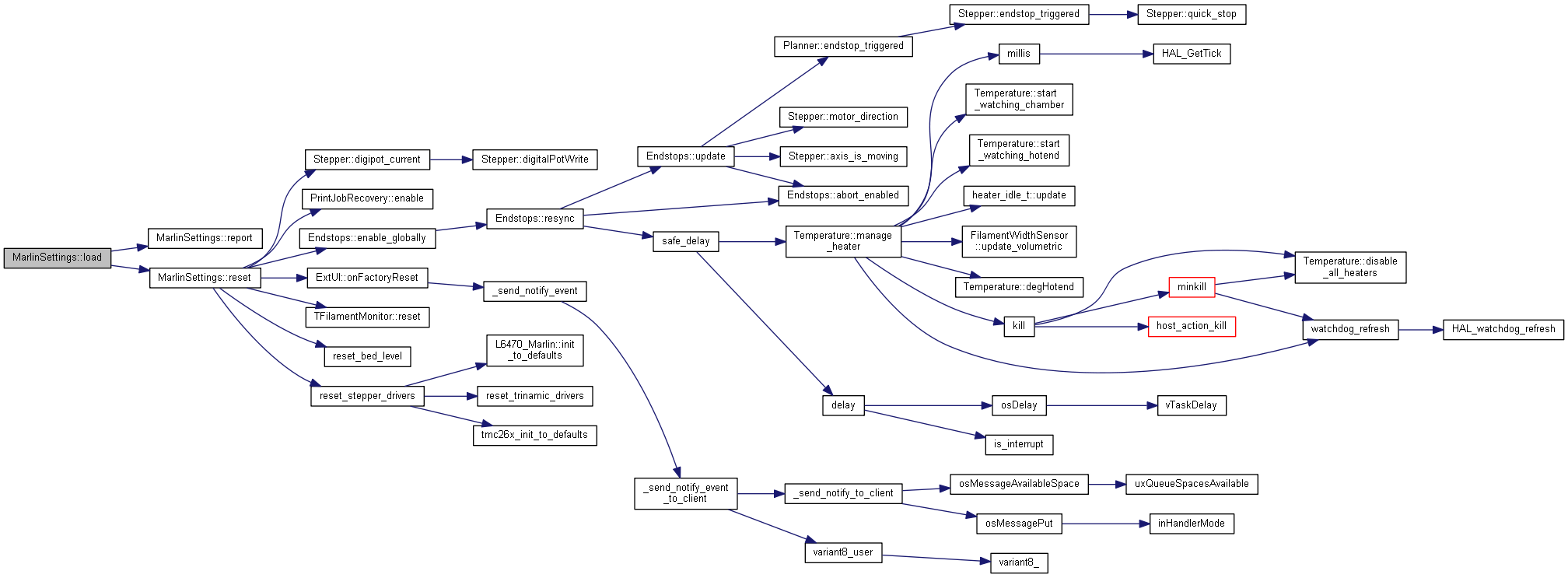
◆ load()
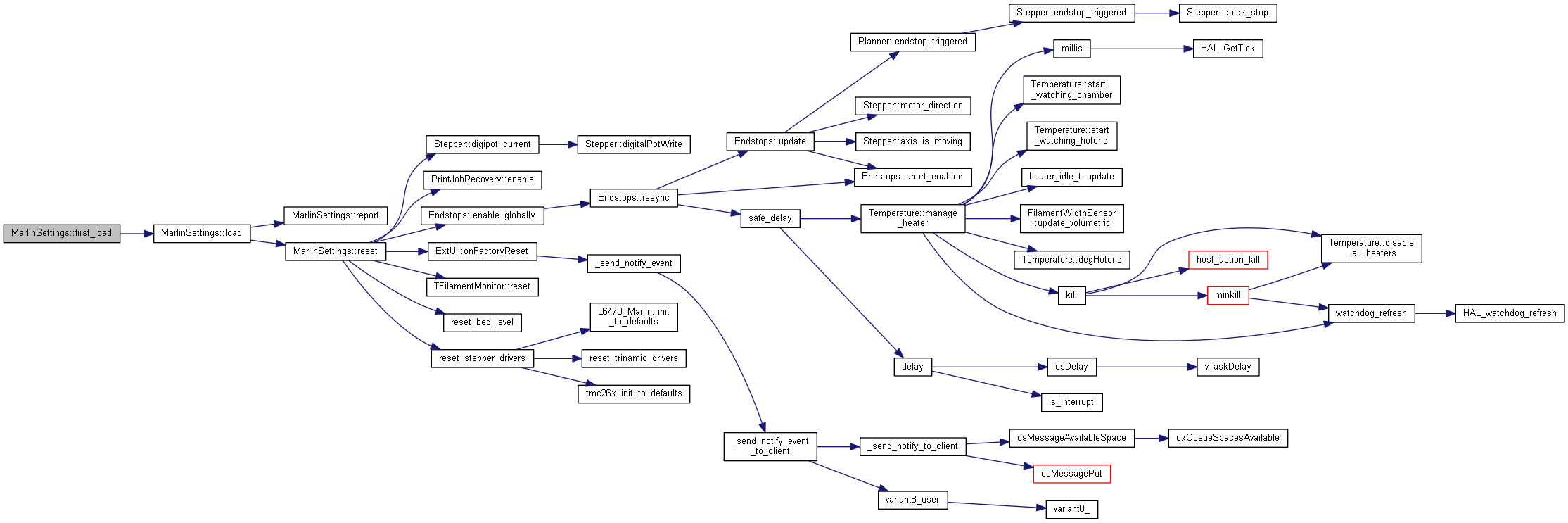
◆ first_load()
◆ report()
float delta_segments_per_second
#define DEFAULT_EJERK
Definition: Configuration_A3ides_2209_MINI.h:733
struct SettingsDataStruct SettingsData
feedRate_t min_feedrate_mm_s
Definition: planner.h:186
feedRate_t max_feedrate_mm_s[XYZE_N]
Definition: planner.h:182
constexpr xyz_pos_t probe_offset
Definition: probe.h:58
#define PREHEAT_1_TEMP_BED
Definition: Configuration_A3ides_2209_MINI.h:1379
list gcode
Definition: g29_auto.py:44
static constexpr uint8_t correction
Definition: backlash.h:41
#define DEBUG_ECHOLNPGM(...)
Definition: debug_out.h:79
#define DEFAULT_TRAVEL_ACCELERATION
Definition: Configuration_A3ides_2209_MINI.h:709
Stepper stepper
Definition: stepper.cpp:82
float retract_acceleration
Definition: planner.h:183
uint8_t i
Definition: screen_test_graph.c:72
#define LOOP_XYZE_N(VAR)
Definition: types.h:62
#define PREHEAT_2_TEMP_HOTEND
Definition: Configuration_A3ides_2209_MINI.h:1383
PrintJobRecovery recovery
#define DEBUG_ECHO_START()
Definition: debug_out.h:72
float feedRate_t
Definition: types.h:80
const float yz
Definition: planner.h:206
#define scalePID_d(d)
Definition: temperature.h:151
abc_float_t delta_endstop_adj
static bool save()
Definition: configuration_store.cpp:2198
static void reset()
Definition: configuration_store.cpp:2208
#define XYZ
Definition: macros.h:27
static const xyz_float_t distance_mm
Definition: backlash.h:42
#define DEBUG_ERROR_MSG(...)
Definition: debug_out.h:85
#define DEFAULT_MINTRAVELFEEDRATE
Definition: Configuration_A3ides_2209_MINI_adv.h:515
static void digipot_current(const uint8_t driver, const int16_t current)
Definition: stepper.cpp:2495
static FORCE_INLINE void report(const bool=false)
Definition: configuration_store.h:88
#define COUNT(a)
Definition: macros.h:200
#define PREHEAT_2_FAN_SPEED
Definition: Configuration_A3ides_2209_MINI.h:1385
#define LOOP_L_N(VAR, N)
Definition: types.h:58
#define LOOP_XYZ(VAR)
Definition: types.h:60
float travel_acceleration
Definition: planner.h:183
float axis_steps_per_mm[XYZE_N]
Definition: planner.h:181
void
Definition: png.h:1083
#define DEFAULT_MINIMUMFEEDRATE
Definition: Configuration_A3ides_2209_MINI_adv.h:514
static void reset()
Definition: runout.h:76
#define ALIM(I, ARR)
Definition: configuration_store.cpp:125
float acceleration
Definition: planner.h:183
#define PREHEAT_1_FAN_SPEED
Definition: Configuration_A3ides_2209_MINI.h:1380
uint32_t max_acceleration_mm_per_s2[XYZE_N]
Definition: planner.h:179
#define pgm_read_float(addr)
Definition: pgmspace.h:109
void reset_stepper_drivers()
Definition: indirection.cpp:41
#define DEFAULT_ACCELERATION
Definition: Configuration_A3ides_2209_MINI.h:707
void onFactoryReset()
Definition: marlin_server.cpp:922
list a
Definition: createSpeedLookupTable.py:29
#define HOTEND_LOOP()
Definition: Conditionals_LCD.h:436
#define scalePID_i(i)
Definition: temperature.h:149
#define DEFAULT_MINSEGMENTTIME
Definition: Configuration_A3ides_2209_MINI_adv.h:532
static float z2_endstop_adj
Definition: endstops.h:51
const uint8_t[]
Definition: 404_html.c:3
#define PREHEAT_2_TEMP_BED
Definition: Configuration_A3ides_2209_MINI.h:1384
const float xz
Definition: planner.h:206
abc_float_t delta_tower_angle_trim
#define DEFAULT_NOMINAL_FILAMENT_DIA
Definition: Configuration_A3ides_2209_MINI.h:151
#define NOZZLE_TO_PROBE_OFFSET
Definition: Configuration_A3ides_2209_MINI.h:858
#define EXTRUDERS
Definition: Configuration_A3ides_2209_MINI.h:148
#define pgm_read_dword(addr)
Definition: pgmspace.h:105
static void enable_globally(const bool onoff=true)
Definition: endstops.cpp:285
const float xy
Definition: planner.h:205
static bool enabled
Definition: runout.h:53
static FORCE_INLINE bool load()
Definition: configuration_store.h:79
#define PID_PARAM(F, H)
Definition: temperature.h:87
float delta_calibration_radius
static planner_settings_t settings
Definition: planner.h:251
feedRate_t min_travel_feedrate_mm_s
Definition: planner.h:186
Temperature thermalManager
Definition: temperature.cpp:89
Endstops endstops
Definition: endstops.cpp:51
#define DEFAULT_RETRACT_ACCELERATION
Definition: Configuration_A3ides_2209_MINI.h:708
uint32_t min_segment_time_us
Definition: planner.h:179
#define ENABLED(V...)
Definition: macros.h:177
#define PREHEAT_1_TEMP_HOTEND
Definition: Configuration_A3ides_2209_MINI.h:1378
Planner planner
Definition: planner.cpp:111
parser
Definition: createSpeedLookupTable.py:14
static void enable(const bool onoff)
static skew_factor_t skew_factor
Definition: planner.h:299


 1.8.16
1.8.16