|
Prusa MINI Firmware overview
|
#include "../core/types.h"Go to the source code of this file.
Macros | |
| #define | DELTA_Z(V, T) |
| #define | DELTA_IK(V) delta.set(DELTA_Z(V, A_AXIS), DELTA_Z(V, B_AXIS), DELTA_Z(V, C_AXIS)) |
Functions | |
| void | recalc_delta_settings () |
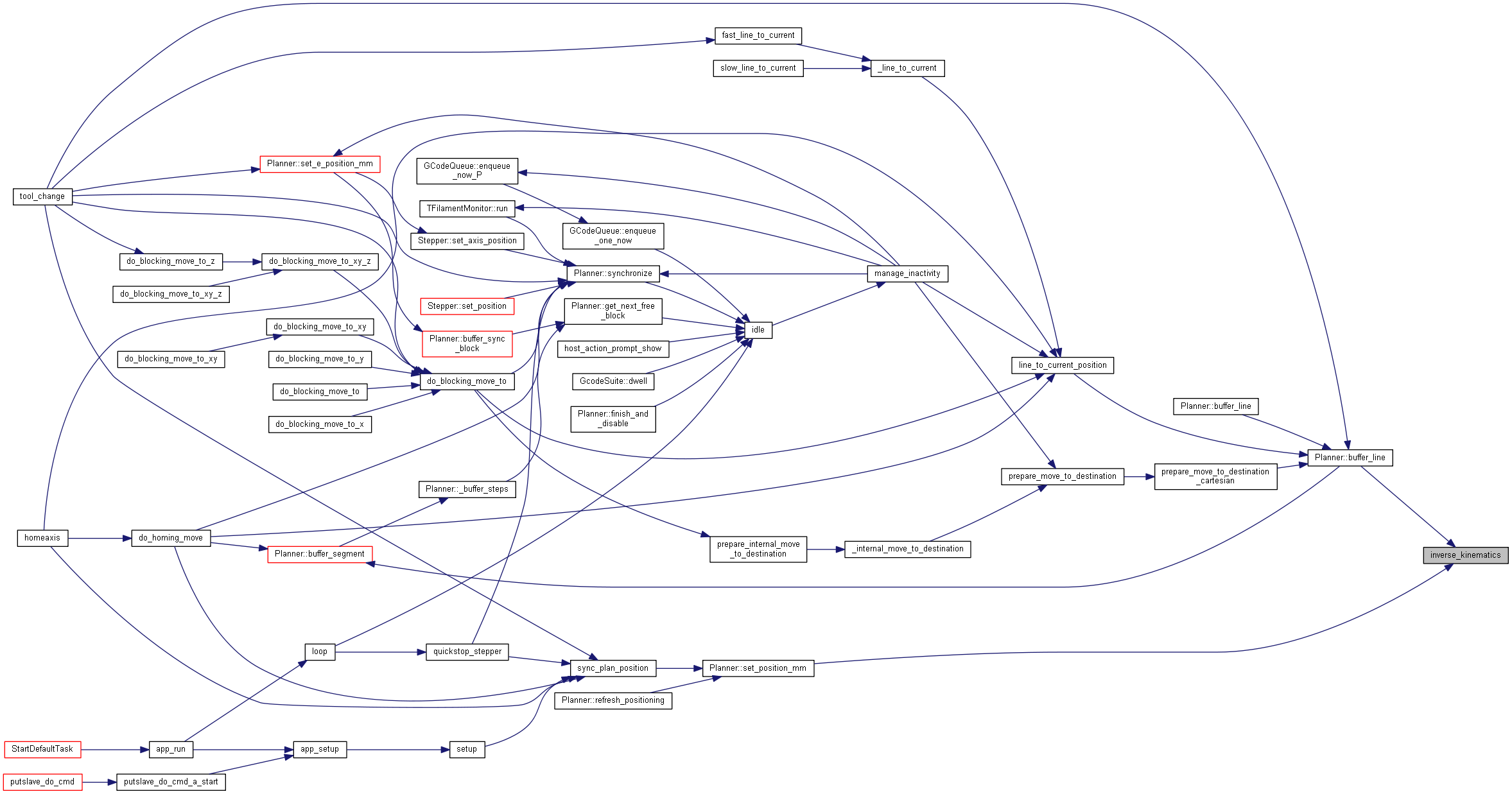
| void | inverse_kinematics (const xyz_pos_t &raw) |
| float | delta_safe_distance_from_top () |
| void | forward_kinematics_DELTA (const float &z1, const float &z2, const float &z3) |
| FORCE_INLINE void | forward_kinematics_DELTA (const abc_float_t &point) |
| void | home_delta () |
Variables | |
| float | delta_height |
| abc_float_t | delta_endstop_adj |
| float | delta_radius |
| float | delta_diagonal_rod |
| float | delta_segments_per_second |
| float | delta_calibration_radius |
| abc_float_t | delta_tower_angle_trim |
| xy_float_t | delta_tower [ABC] |
| abc_float_t | delta_diagonal_rod_2_tower |
| float | delta_clip_start_height |
| #define DELTA_Z | ( | V, | |
| T | |||
| ) |
Delta Inverse Kinematics
Calculate the tower positions for a given machine position, storing the result in the delta[] array.
This is an expensive calculation, requiring 3 square roots per segmented linear move, and strains the limits of a Mega2560 with a Graphical Display.
Suggested optimizations include:
| void recalc_delta_settings | ( | ) |
Recalculate factors used for delta kinematics whenever settings have been changed (e.g., by M665).
| float delta_safe_distance_from_top | ( | ) |
Calculate the highest Z position where the effector has the full range of XY motion.

Delta Forward Kinematics
See the Wikipedia article "Trilateration" https://en.wikipedia.org/wiki/Trilateration
Establish a new coordinate system in the plane of the three carriage points. This system has its origin at tower1, with tower2 on the X axis. Tower3 is in the X-Y plane with a Z component of zero. We will define unit vectors in this coordinate system in our original coordinate system. Then when we calculate the Xnew, Ynew and Znew values, we can translate back into the original system by moving along those unit vectors by the corresponding values.
Variable names matched to Marlin, c-version, and avoid the use of any vector library.
by Andreas Hardtung 2016-06-07 based on a Java function from "Delta Robot Kinematics V3" by Steve Graves
The result is stored in the cartes[] array.

| FORCE_INLINE void forward_kinematics_DELTA | ( | const abc_float_t & | point | ) |

| void home_delta | ( | ) |
| float delta_height |
Marlin 3D Printer Firmware Copyright (c) 2019 MarlinFirmware [https://github.com/MarlinFirmware/Marlin]
Based on Sprinter and grbl. Copyright (c) 2011 Camiel Gubbels / Erik van der Zalm
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/. delta.h - Delta-specific functions
| abc_float_t delta_endstop_adj |
| float delta_radius |
| float delta_diagonal_rod |
| float delta_segments_per_second |
| float delta_calibration_radius |
| abc_float_t delta_tower_angle_trim |
| xy_float_t delta_tower[ABC] |
| abc_float_t delta_diagonal_rod_2_tower |
| float delta_clip_start_height |
 1.8.16
1.8.16