|
Prusa MINI Firmware overview
|
#include <runout.h>
Static Public Member Functions | |
| static void | setup () |
| static void | reset () |
| static void | filament_present (const uint8_t extruder) |
| static void | block_completed (const block_t *const b) |
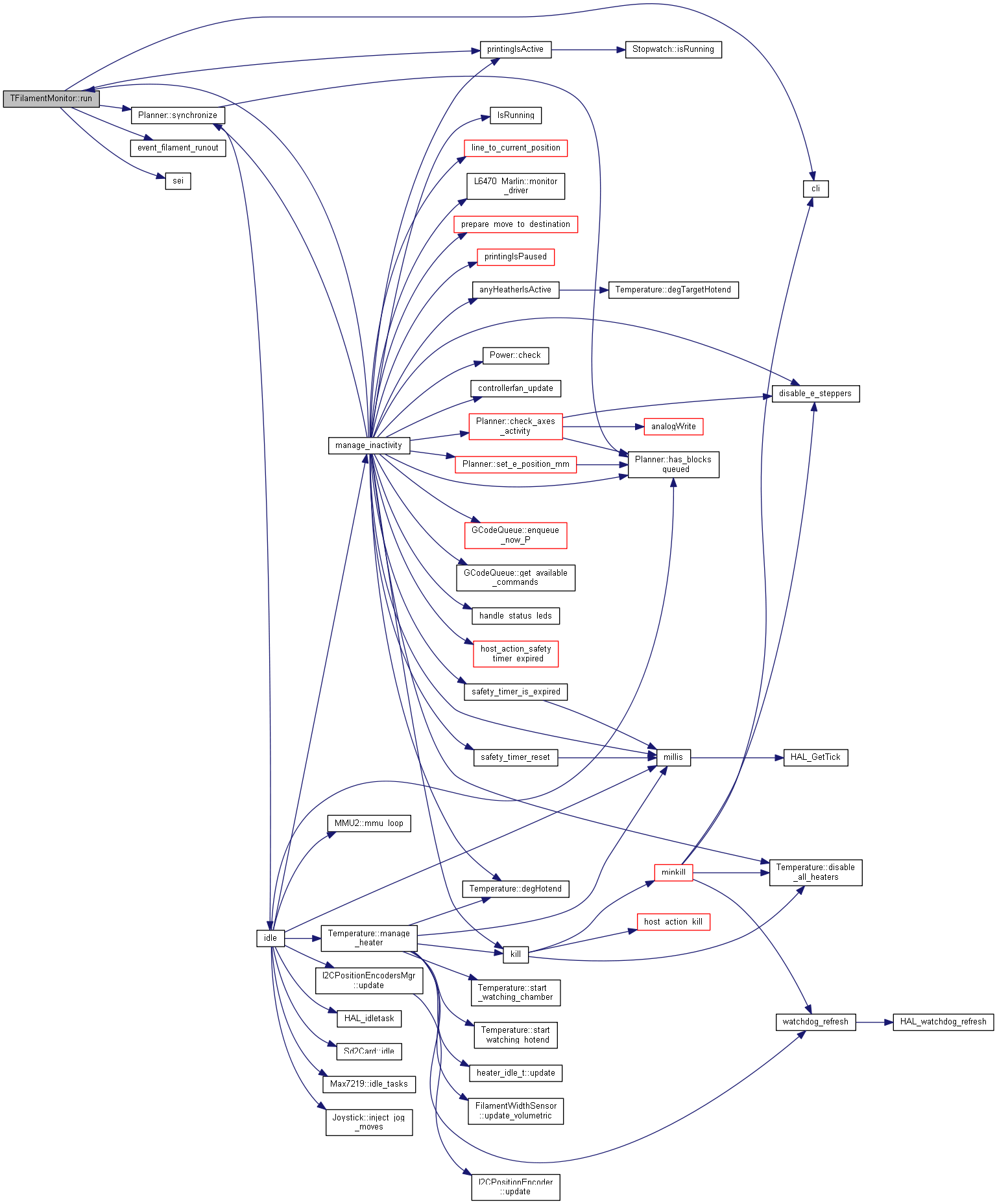
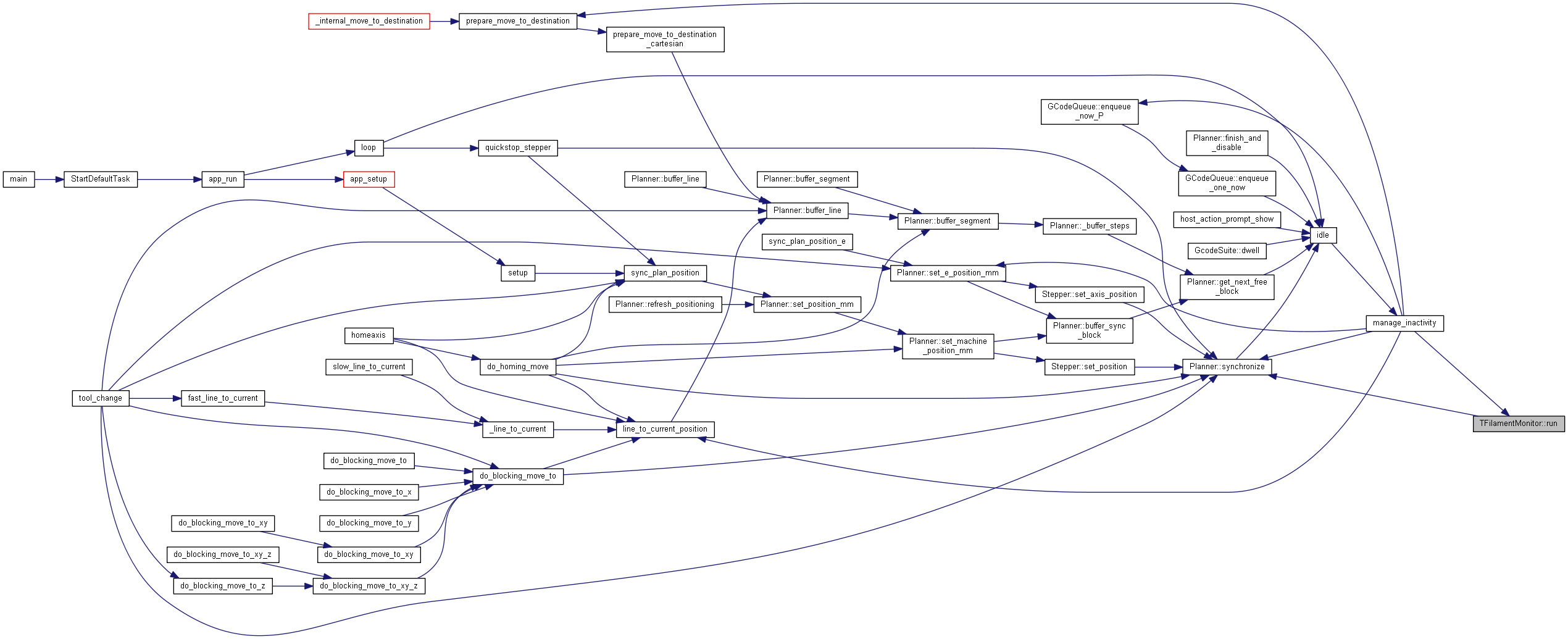
| static void | run () |
Additional Inherited Members | |
 Static Public Attributes inherited from FilamentMonitorBase Static Public Attributes inherited from FilamentMonitorBase | |
| static bool | enabled |
| static bool | filament_ran_out |
| static constexpr bool | host_handling = false |
|
static |


|
static |

|
static |
|
static |
|
static |
 1.8.16
1.8.16 

