#include <power_loss_recovery.h>
◆ init()
| static void PrintJobRecovery::init |
( |
| ) |
|
|
static |
◆ prepare()
| static void PrintJobRecovery::prepare |
( |
| ) |
|
|
static |
◆ setup()
| static void PrintJobRecovery::setup |
( |
| ) |
|
|
static |
121 #if PIN_EXISTS(POWER_LOSS)
122 #if ENABLED(POWER_LOSS_PULL)
123 #if POWER_LOSS_STATE == LOW
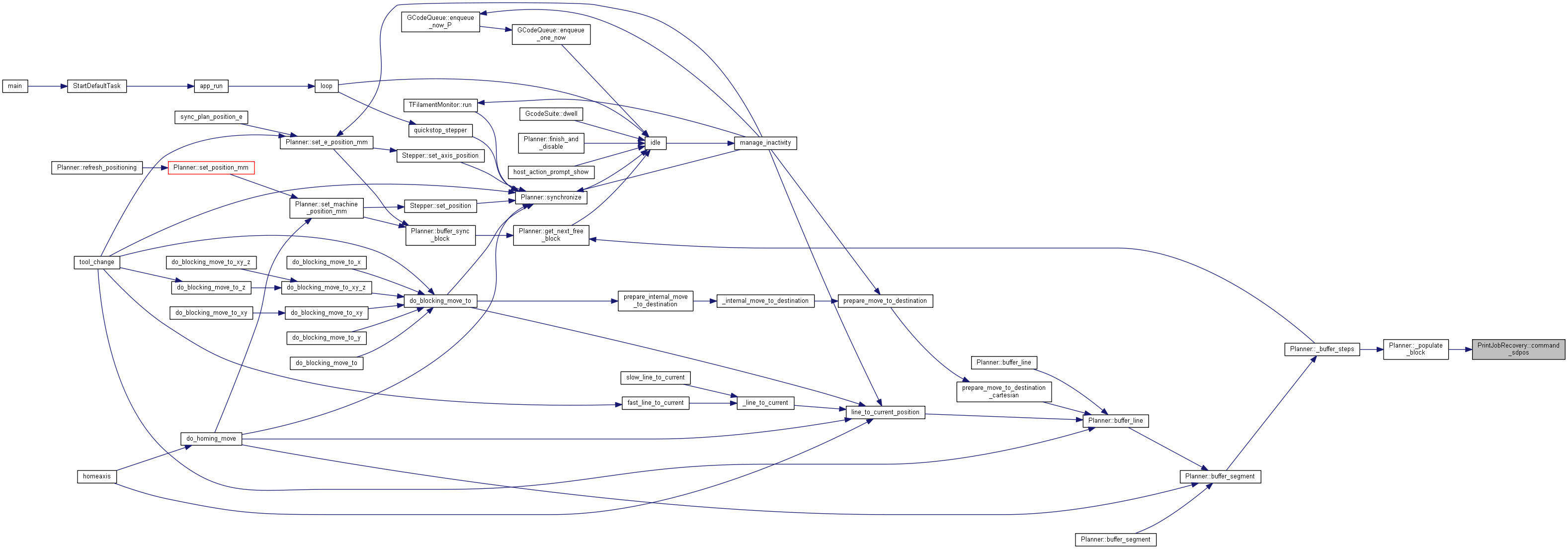
◆ command_sdpos()
| static uint32_t PrintJobRecovery::command_sdpos |
( |
| ) |
|
|
static |
◆ commit_sdpos()
◆ enable()
| static void PrintJobRecovery::enable |
( |
const bool |
onoff | ) |
|
|
static |
◆ changed()
| static void PrintJobRecovery::changed |
( |
| ) |
|
|
static |
◆ check()
| static void PrintJobRecovery::check |
( |
| ) |
|
|
static |
◆ resume()
| static void PrintJobRecovery::resume |
( |
| ) |
|
|
static |
◆ exists()
| static bool PrintJobRecovery::exists |
( |
| ) |
|
|
static |
145 {
return card.jobRecoverFileExists(); }
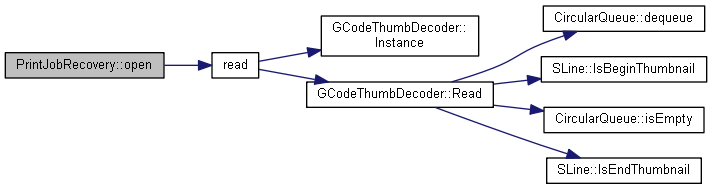
◆ open()
| static void PrintJobRecovery::open |
( |
const bool |
read | ) |
|
|
static |
146 { card.openJobRecoveryFile(
read); }
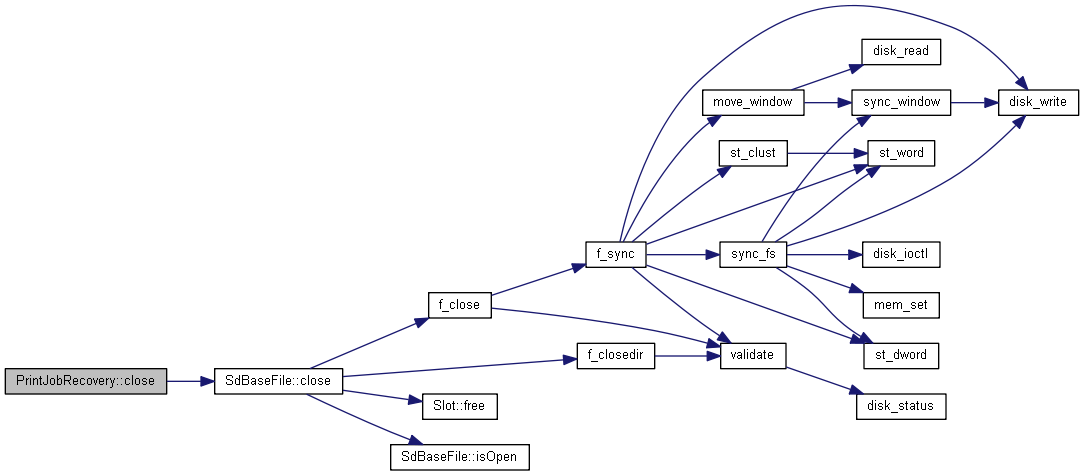
◆ close()
| static void PrintJobRecovery::close |
( |
| ) |
|
|
static |
◆ purge()
| static void PrintJobRecovery::purge |
( |
| ) |
|
|
static |
◆ load()
| static void PrintJobRecovery::load |
( |
| ) |
|
|
static |
◆ save()
| static void PrintJobRecovery::save |
( |
const bool |
force = false, |
|
|
const bool |
save_queue = true |
|
) |
| |
|
static |
◆ valid()
| static bool PrintJobRecovery::valid |
( |
| ) |
|
|
static |
◆ debug()
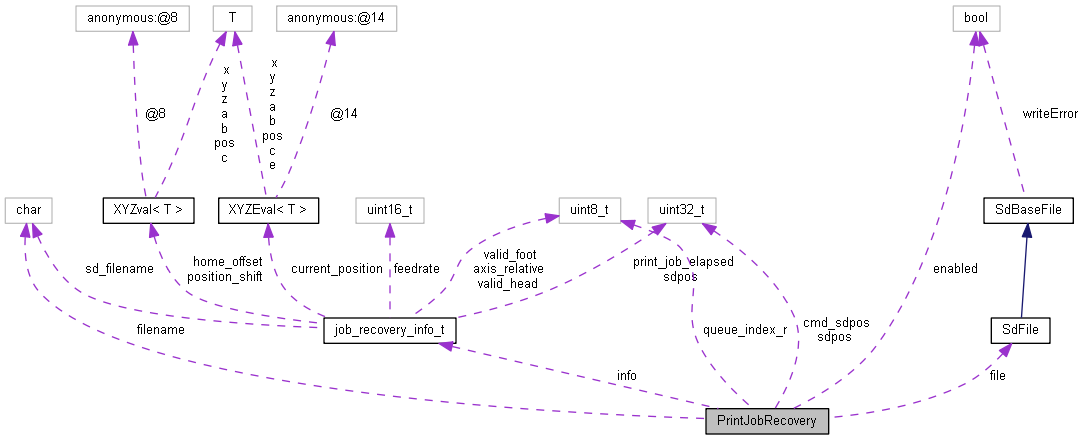
◆ filename
| const char PrintJobRecovery::filename[5] |
|
static |
◆ file
◆ info
◆ queue_index_r
| uint8_t PrintJobRecovery::queue_index_r |
|
static |
Queue index of the active command.
◆ cmd_sdpos
| uint32_t PrintJobRecovery::cmd_sdpos |
|
static |
SD position of the next command.
◆ sdpos
| uint32_t PrintJobRecovery::sdpos[BUFSIZE] |
|
static |
SD positions of queued commands.
◆ enabled
| bool PrintJobRecovery::enabled |
|
static |




 1.8.16
1.8.16