|
Prusa MINI Firmware overview
|
#include <inttypes.h>
Go to the source code of this file.
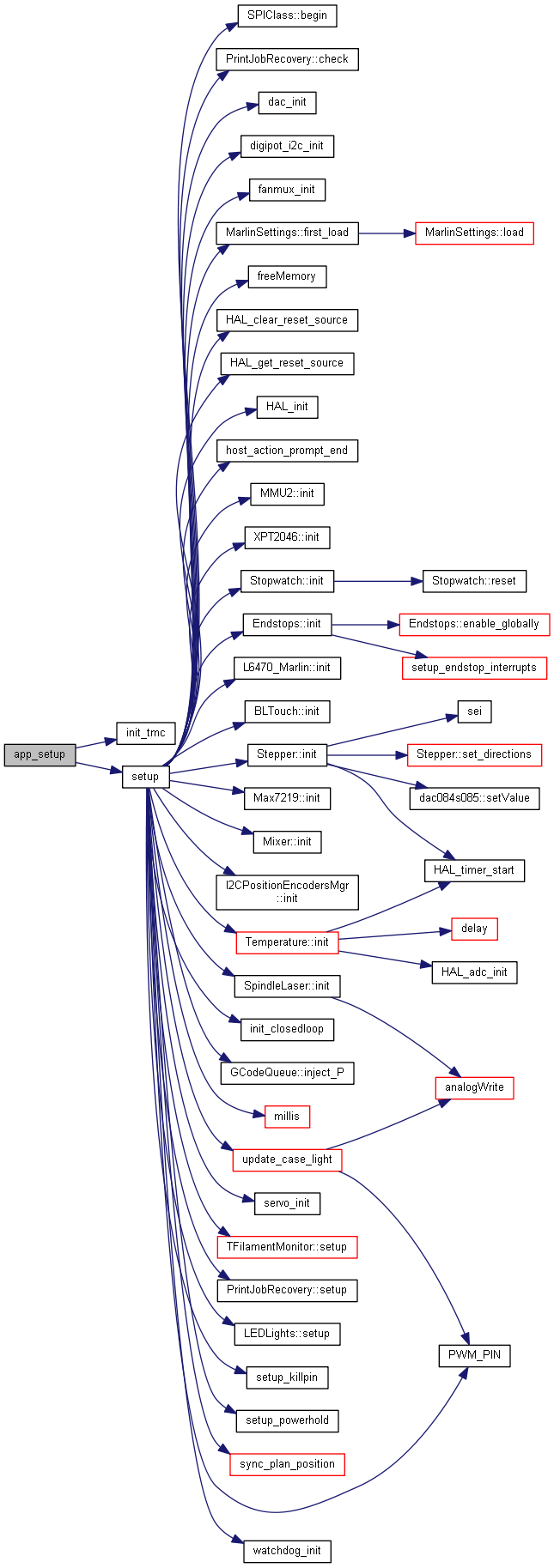
◆ app_setup()
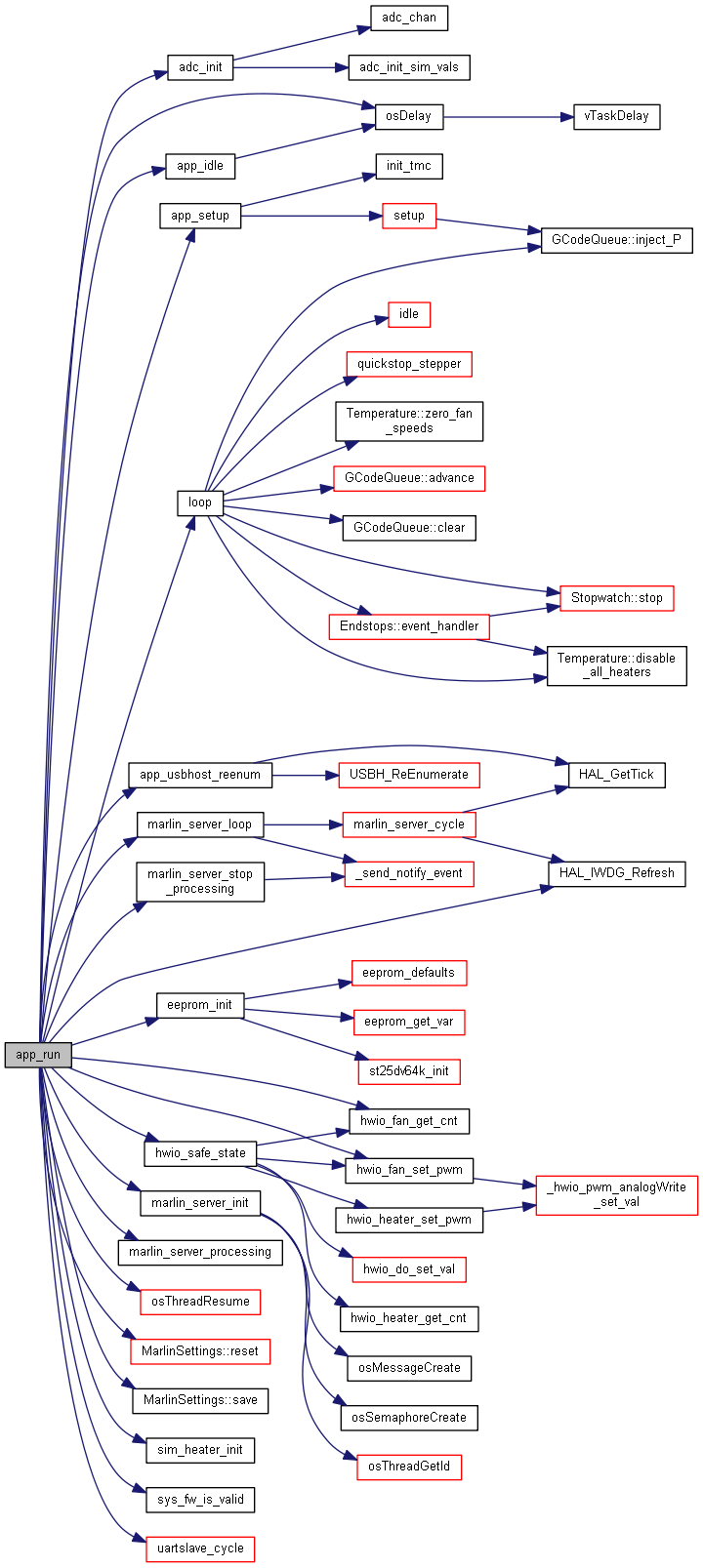
◆ app_run()
114 #ifdef JOGWHEEL_TRACE
120 #endif //JOGWHEEL_TRACE
121 #ifdef SIM_MOTION_TRACE_X
127 #endif //SIM_MOTION_TRACE_X
128 #ifdef SIM_MOTION_TRACE_Y
134 #endif //SIM_MOTION_TRACE_Y
135 #ifdef SIM_MOTION_TRACE_Z
141 #endif //SIM_MOTION_TRACE_Z
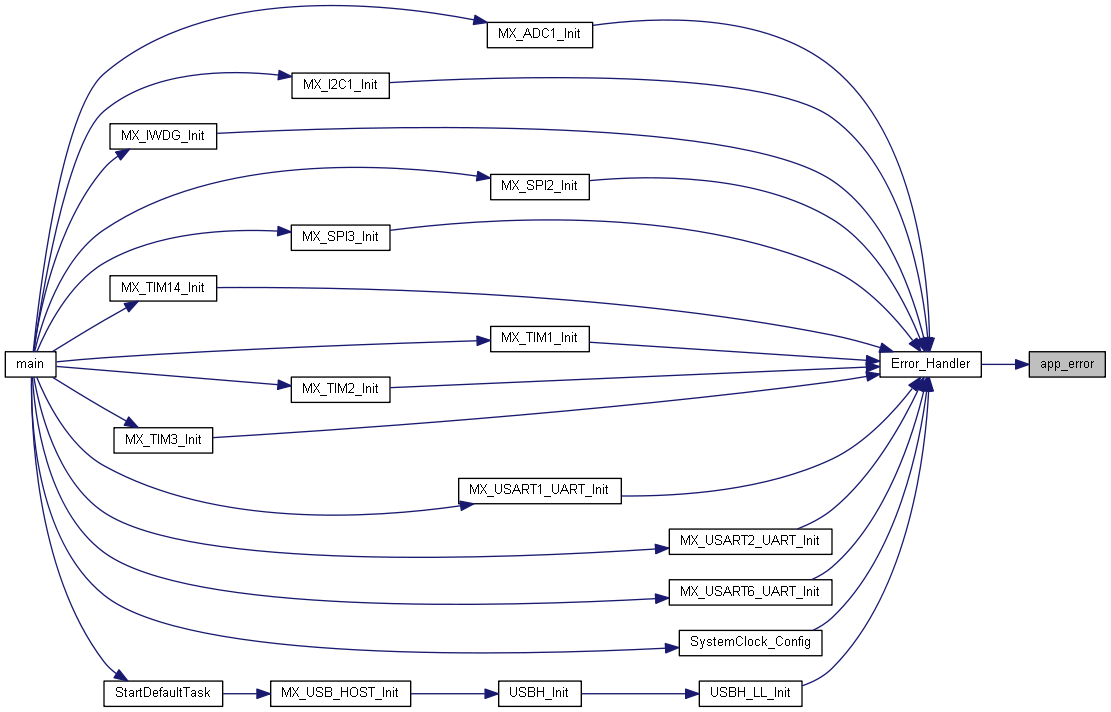
◆ app_error()
◆ app_assert()
◆ app_cdc_rx()
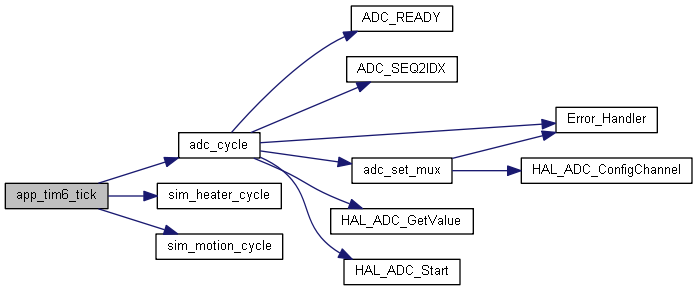
◆ app_tim6_tick()
160 static uint8_t cnt_sim_heater = 0;
161 if (++cnt_sim_heater >= 50)
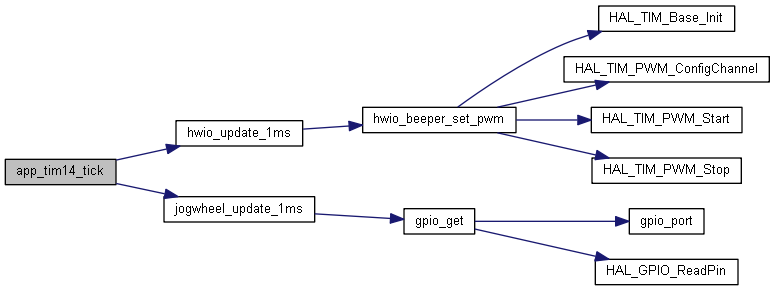
◆ app_tim14_tick()
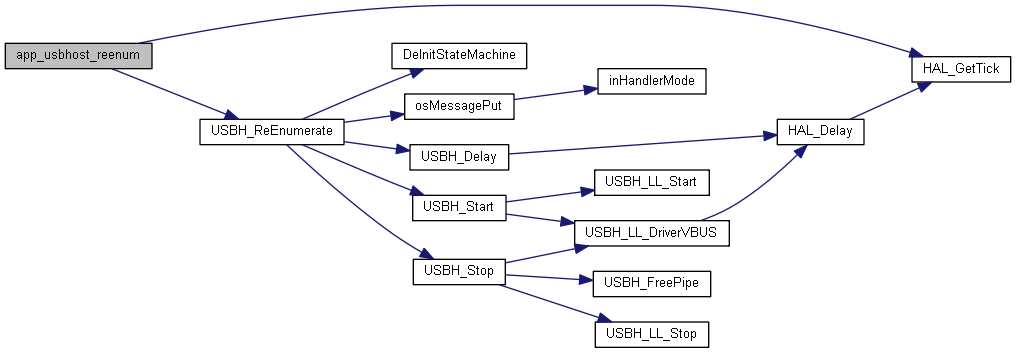
◆ app_usbhost_reenum()
188 static uint32_t timer = 0;
190 if ((tick - timer) > 100) {
194 if ((tick - timer) > 500) {
195 _dbg(
"USB host reenumerating");
void hwio_safe_state(void)
Put hardware into safe state.
Definition: safe_state.c:8
MarlinSettings settings
Definition: configuration_store.cpp:344
void app_setup(void)
Definition: appmain.cpp:51
void uartslave_cycle(uartslave_t *pslave)
Definition: uartslave.c:68
void setup(void)
Definition: Marlin.cpp:818
osStatus osThreadResume(osThreadId thread_id)
Resume execution of a suspended thread.
Definition: cmsis_os.c:1494
void marlin_server_stop_processing(void)
Definition: marlin_server.cpp:293
uint8_t i
Definition: screen_test_graph.c:72
int diag_fastboot
Definition: diag.c:11
Definition: usbh_def.h:333
static bool save()
Definition: configuration_store.cpp:2198
static void reset()
Definition: configuration_store.cpp:2208
uint8_t eeprom_init(void)
Definition: eeprom.c:53
osStatus osDelay(uint32_t millisec)
Wait for Timeout (Time Delay)
Definition: cmsis_os.c:365
uint32_t HAL_GetTick(void)
Provides a tick value in millisecond.
Definition: stm32f4xx_hal.c:339
void hwio_update_1ms(void)
Definition: hwio_a3ides_2209_02.c:539
uartslave_t uart6slave
Definition: main.c:149
int32_t jogwheel_encoder
Definition: jogwheel.c:10
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
void adc_cycle(void)
Definition: adc.c:65
void loop(void)
Definition: Marlin.cpp:1127
Definition: usbh_def.h:346
int hwio_fan_get_cnt(void)
Definition: hwio_a3ides_2209_02.c:444
int sys_fw_is_valid(void)
Definition: sys.cpp:266
uint8_t jogwheel_signals
Definition: jogwheel.c:7
#define DBG
Definition: appmain.cpp:33
osThreadId webServerTaskHandle
Definition: main.c:100
USBH_StatusTypeDef USBH_ReEnumerate(USBH_HandleTypeDef *phost)
HCD_ReEnumerate Perform a new Enumeration phase.
Definition: usbh_core.c:371
void hwio_fan_set_pwm(int i_fan, int val)
Definition: hwio_a3ides_2209_02.c:447
USBH_HandleTypeDef hUsbHostHS
Definition: usb_host.c:74
const uint8_t[]
Definition: 404_html.c:3
#define _dbg(...)
Definition: dbg.h:50
void sim_heater_init(void)
void app_idle(void)
Definition: appmain.cpp:58
void jogwheel_update_1ms(void)
Definition: jogwheel.c:22
ENUM_StateTypeDef EnumState
Definition: usbh_def.h:453
void app_usbhost_reenum(void)
Definition: appmain.cpp:187
int marlin_server_loop(void)
Definition: marlin_server.cpp:239
#define bsod(fmt,...)
Definition: bsod.h:20
IWDG_HandleTypeDef hiwdg
Definition: watchdog.h:24
marlin_server_idle_t * marlin_server_idle_cb
Definition: marlin_server.cpp:94
void marlin_server_init(void)
Definition: marlin_server.cpp:154
int32_t sim_motion_pos[4]
void USBSerial_put_rx_data(uint8_t *buffer, uint32_t length)
Definition: USBSerial.cpp:53
png_uint_32 length
Definition: png.c:2247
void adc_init(void)
Definition: adc.c:53
__IO HOST_StateTypeDef gState
Definition: usbh_def.h:452
void sim_heater_cycle(void)
void sim_motion_cycle(void)
int marlin_server_processing(void)
Definition: marlin_server.cpp:284




 1.8.16
1.8.16