|
Prusa MINI Firmware overview
|
Go to the source code of this file.
◆ MARLIN_SFLG_STARTED
| #define MARLIN_SFLG_STARTED 0x0001 |
◆ MARLIN_SFLG_PROCESS
| #define MARLIN_SFLG_PROCESS 0x0002 |
◆ MARLIN_SFLG_BUSY
| #define MARLIN_SFLG_BUSY 0x0004 |
◆ MARLIN_SFLG_PENDREQ
| #define MARLIN_SFLG_PENDREQ 0x0008 |
◆ MARLIN_UPDATE_PERIOD
| #define MARLIN_UPDATE_PERIOD 100 |
◆ MSG_STACK_SIZE
◆ MSG_MAX_LENGTH
| #define MSG_MAX_LENGTH 21 |
◆ marlin_server_idle_t
| typedef void() marlin_server_idle_t(void) |
◆ msg_stack_t
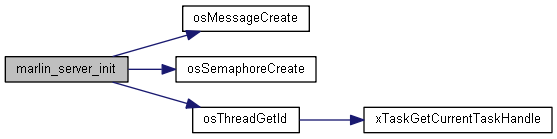
◆ marlin_server_init()
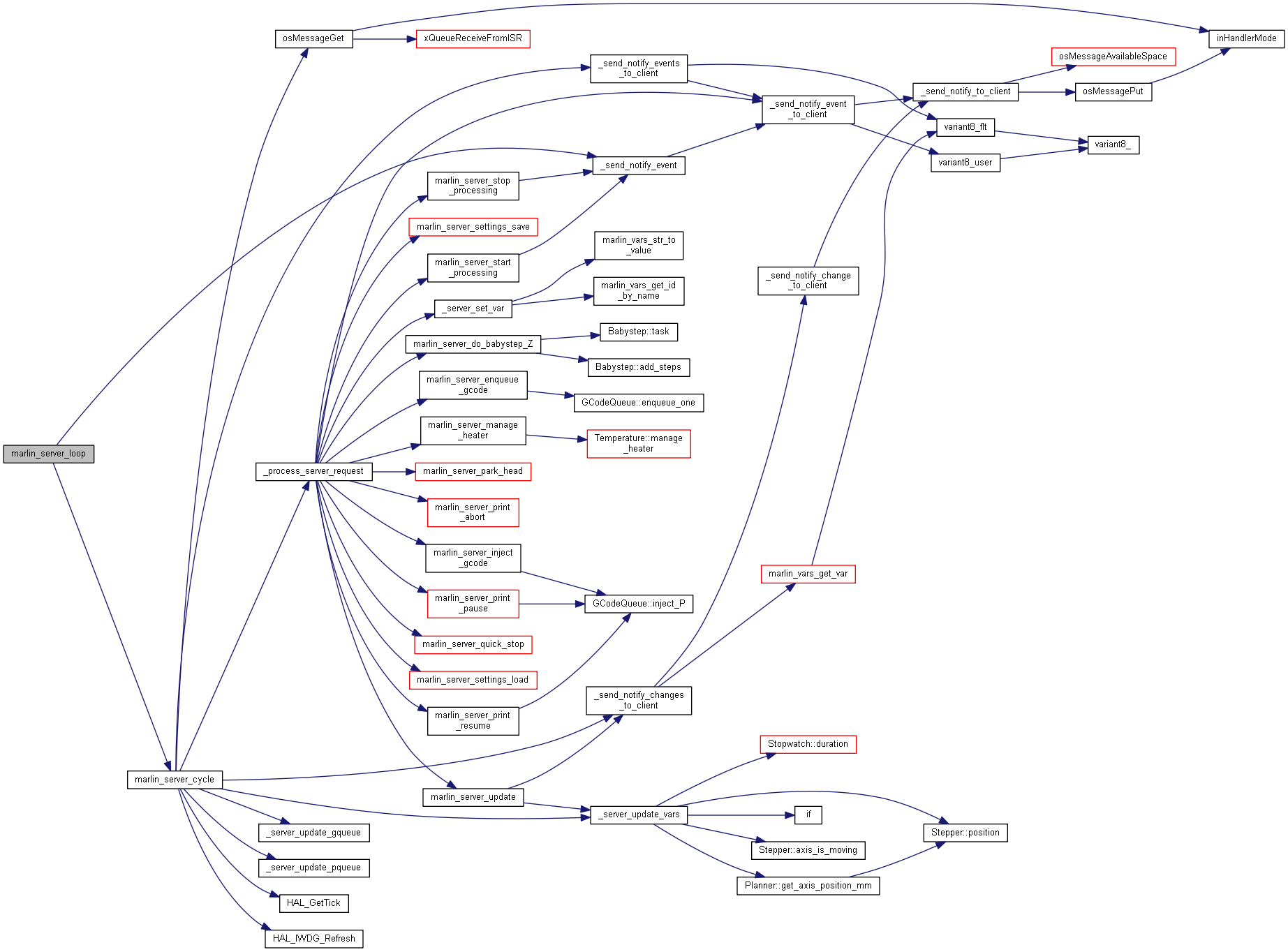
◆ marlin_server_loop()
| int marlin_server_loop |
( |
void |
| ) |
|
◆ marlin_server_processing()
| int marlin_server_processing |
( |
void |
| ) |
|
◆ marlin_server_start_processing()
| void marlin_server_start_processing |
( |
void |
| ) |
|
◆ marlin_server_stop_processing()
| void marlin_server_stop_processing |
( |
void |
| ) |
|
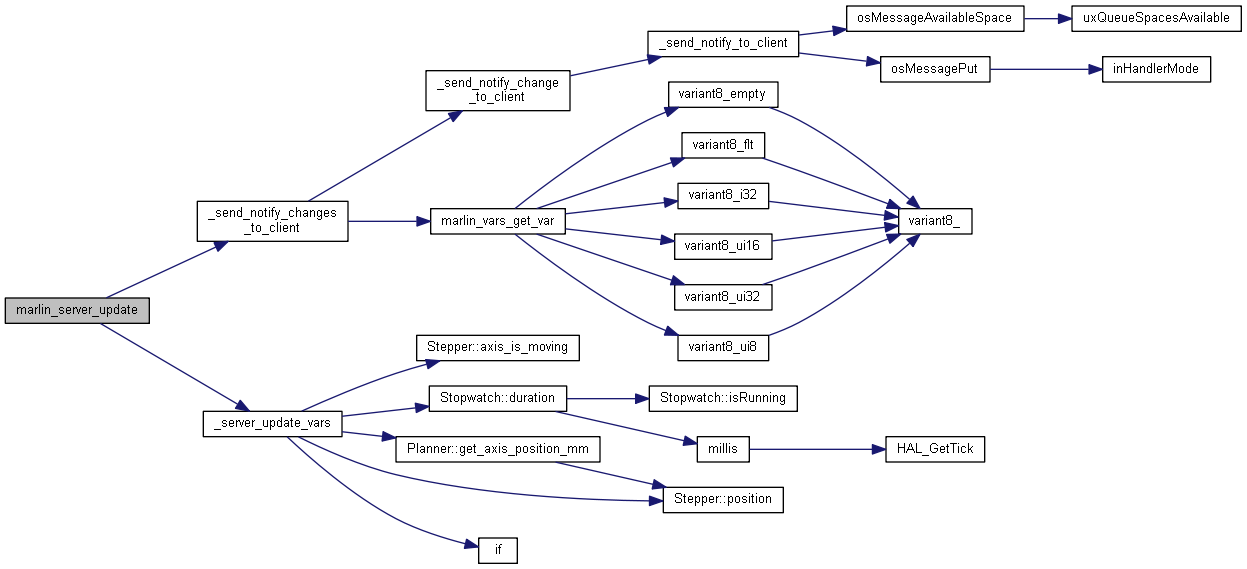
◆ marlin_server_update()
| void marlin_server_update |
( |
uint64_t |
update | ) |
|
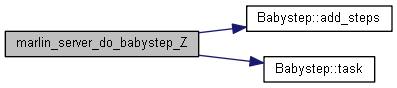
◆ marlin_server_do_babystep_Z()
| void marlin_server_do_babystep_Z |
( |
float |
offs | ) |
|
◆ marlin_server_enqueue_gcode()
| int marlin_server_enqueue_gcode |
( |
const char * |
gcode | ) |
|
◆ marlin_server_inject_gcode()
| int marlin_server_inject_gcode |
( |
const char * |
gcode | ) |
|
◆ marlin_server_settings_save()
| void marlin_server_settings_save |
( |
void |
| ) |
|
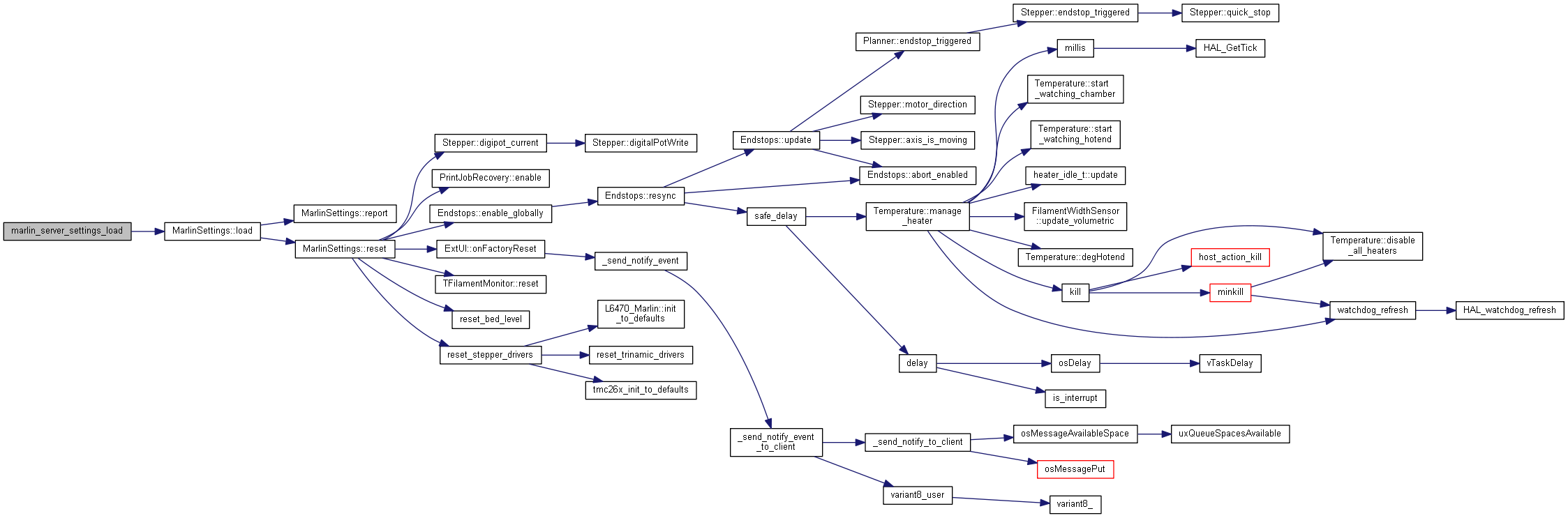
◆ marlin_server_settings_load()
| void marlin_server_settings_load |
( |
void |
| ) |
|
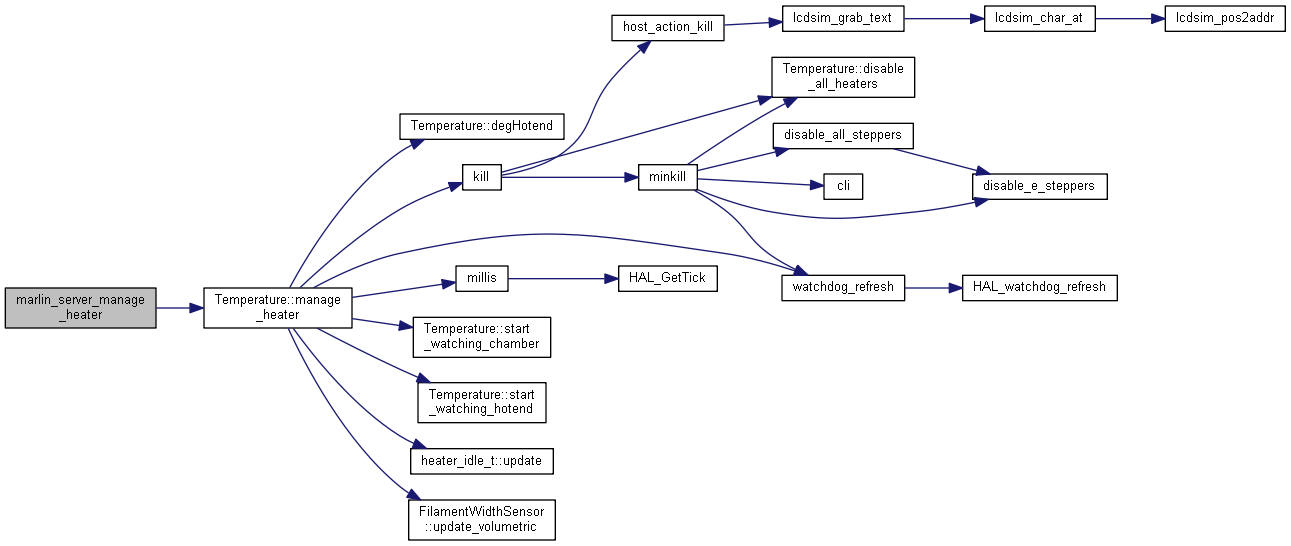
◆ marlin_server_manage_heater()
| void marlin_server_manage_heater |
( |
void |
| ) |
|
◆ marlin_server_quick_stop()
◆ marlin_server_print_abort()
345 card.flag.abort_sd_printing =
true;
◆ marlin_server_print_pause()
◆ marlin_server_print_resume()
| void marlin_server_print_resume |
( |
void |
| ) |
|
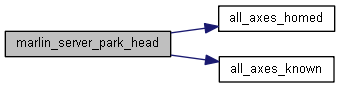
◆ marlin_server_park_head()
368 xyz_pos_t park_point = NOZZLE_PARK_POINT;
369 nozzle.park(2, park_point);
◆ marlin_all_axes_homed()
| int marlin_all_axes_homed |
( |
void |
| ) |
|
◆ marlin_all_axes_known()
| int marlin_all_axes_known |
( |
void |
| ) |
|
◆ msg_stack
◆ marlin_server_idle_cb
#define MARLIN_MAX_CLIENTS
Definition: config.h:96
#define MARLIN_VAR_MSK_DEF
Definition: marlin_vars.h:52
marlin_mesh_t mesh
Definition: marlin_server.cpp:71
uint64_t _server_update_vars(uint64_t force_update_msk)
Definition: marlin_server.cpp:537
uint64_t notify_changes
Definition: marlin_server.cpp:57
host_prompt_button_t host_prompt_button_clicked
Definition: marlin_server.cpp:128
uint64_t _send_notify_changes_to_client(int client_id, osMessageQId queue, uint64_t var_msk)
Definition: marlin_server.cpp:504
#define osSemaphore(name)
Definition: cmsis_os.h:709
GCodeQueue queue
Definition: queue.cpp:28
MarlinSettings settings
Definition: configuration_store.cpp:344
list gcode
Definition: g29_auto.py:44
osThreadId marlin_server_task
Definition: marlin_server.cpp:88
Stopwatch print_job_timer
Definition: printcounter.cpp:63
uint16_t flags
Definition: marlin_server.cpp:55
#define MARLIN_SFLG_BUSY
Definition: marlin_server.h:13
#define MARLIN_EVT_MSK_DEF
Definition: marlin_events.h:43
osMessageQId marlin_server_queue
Definition: marlin_server.cpp:89
static void manage_heater() _O2
Definition: temperature.cpp:975
static bool stop()
Stop the stopwatch.
Definition: stopwatch.cpp:36
uint8_t xc
Definition: marlin_events.h:104
osThreadId osThreadGetId(void)
Return the thread ID of the current running thread.
Definition: cmsis_os.c:283
#define NULL
Definition: usbd_def.h:53
static bool save()
Definition: configuration_store.cpp:2198
bool wait_for_user
Definition: Marlin.cpp:188
uint64_t client_changes[MARLIN_MAX_CLIENTS]
Definition: marlin_server.cpp:62
QueueHandle_t osMessageQId
Definition: cmsis_os.h:303
marlin_server_t marlin_server
Definition: marlin_server.cpp:92
FORCE_INLINE bool all_axes_known()
Definition: motion.h:45
Definition: marlin_server.cpp:54
void _send_notify_event(uint8_t evt_id, uint32_t usr32, uint16_t usr16)
Definition: marlin_server.cpp:481
osSemaphoreId osSemaphoreCreate(const osSemaphoreDef_t *semaphore_def, int32_t count)
Create and Initialize a Semaphore object used for managing resources.
Definition: cmsis_os.c:755
osSemaphoreId marlin_server_sema
Definition: marlin_server.cpp:90
#define osSemaphoreDef(name)
Definition: cmsis_os.h:700
uint64_t notify_events
Definition: marlin_server.cpp:56
osMessageQId marlin_client_queue[MARLIN_MAX_CLIENTS]
Definition: marlin_client.c:60
#define MARLIN_EVT_CommandEnd
Definition: marlin_events.h:34
#define MARLIN_EVT_StopProcessing
Definition: marlin_events.h:29
float axis_steps_per_mm[XYZE_N]
Definition: planner.h:181
void
Definition: png.h:1083
static bool pause()
Pause the stopwatch.
Definition: stopwatch.cpp:52
static bool enqueue_one(const char *cmd)
Definition: queue.cpp:157
const uint8_t[]
Definition: 404_html.c:3
uint8_t idle_cnt
Definition: marlin_server.cpp:65
#define MARLIN_SFLG_STARTED
Definition: marlin_server.h:11
static void quick_stop()
Definition: planner.cpp:1475
uint8_t yc
Definition: marlin_events.h:105
#define MARLIN_EVT_Ready
Definition: marlin_events.h:31
#define MARLIN_EVT_StartProcessing
Definition: marlin_events.h:28
osMessageQId osMessageCreate(const osMessageQDef_t *queue_def, osThreadId thread_id)
Create and Initialize a Message Queue.
Definition: cmsis_os.c:1086
#define osMessageQ(name)
Access a Message Queue Definition.
Definition: cmsis_os.h:829
static FORCE_INLINE bool load()
Definition: configuration_store.h:79
#define MARLIN_CMD_NONE
Definition: marlin_events.h:50
int marlin_server_cycle(void)
Definition: marlin_server.cpp:168
static void inject_P(PGM_P const pgcode)
Definition: queue.cpp:206
Definition: marlin_host.h:27
bool wait_for_heatup
Definition: Marlin.cpp:184
#define MARLIN_IDLE_CNT_BUSY
Definition: marlin_server.cpp:237
static planner_settings_t settings
Definition: planner.h:251
Nozzle nozzle
Definition: nozzle.cpp:29
uint32_t command
Definition: marlin_server.cpp:70
#define MARLIN_SFLG_PROCESS
Definition: marlin_server.h:12
Temperature thermalManager
Definition: temperature.cpp:89
static void add_steps(const AxisEnum axis, const int16_t distance)
Planner planner
Definition: planner.cpp:111
FORCE_INLINE bool all_axes_homed()
Definition: motion.h:44
#define osMessageQDef(name, queue_sz, type)
Create a Message Queue Definition.
Definition: cmsis_os.h:818




















 1.8.16
1.8.16