#include <I2CPositionEncoder.h>
◆ init()
◆ reset()
| void I2CPositionEncoder::reset |
( |
| ) |
|
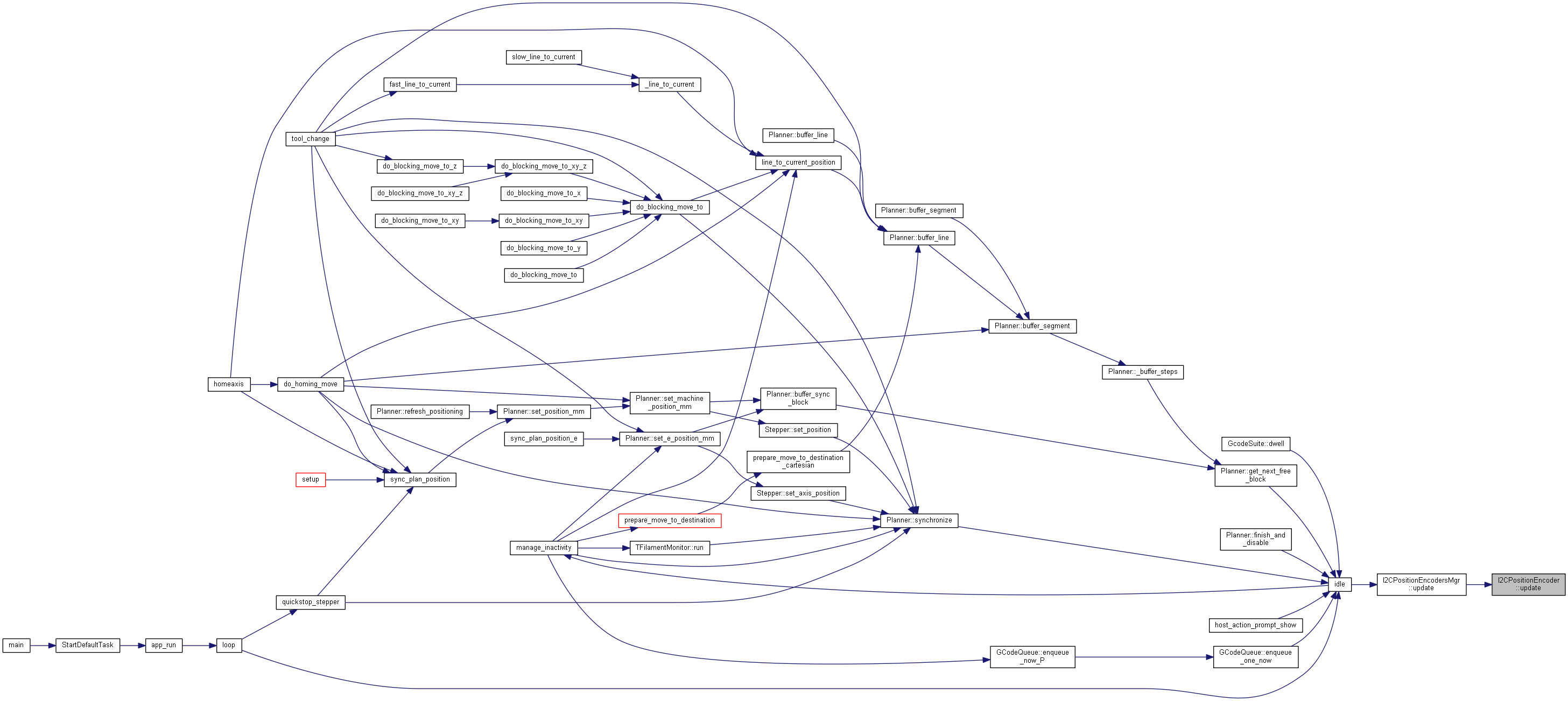
◆ update()
| void I2CPositionEncoder::update |
( |
| ) |
|
◆ set_homed()
| void I2CPositionEncoder::set_homed |
( |
| ) |
|
◆ set_unhomed()
| void I2CPositionEncoder::set_unhomed |
( |
| ) |
|
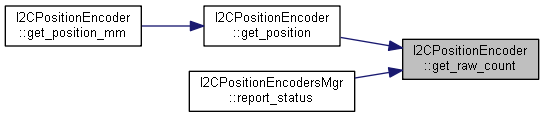
◆ get_raw_count()
| int32_t I2CPositionEncoder::get_raw_count |
( |
| ) |
|
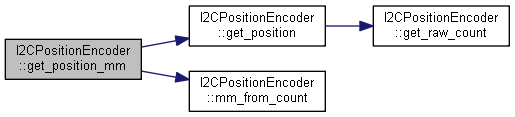
◆ mm_from_count()
153 return count / encoderTicksPerUnit;
◆ get_position_mm()
◆ get_position()
◆ get_axis_error_steps()
| int32_t I2CPositionEncoder::get_axis_error_steps |
( |
const bool |
report | ) |
|
◆ get_axis_error_mm()
| float I2CPositionEncoder::get_axis_error_mm |
( |
const bool |
report | ) |
|
◆ calibrate_steps_mm()
◆ passes_test()
| bool I2CPositionEncoder::passes_test |
( |
const bool |
report | ) |
|
◆ test_axis()
| bool I2CPositionEncoder::test_axis |
( |
| ) |
|
◆ get_error_count()
171 {
return errorCount; }
◆ set_error_count()
172 { errorCount = newCount; }
◆ get_address()
174 {
return i2cAddress; }
◆ set_address()
175 { i2cAddress = addr; }
◆ get_active()
◆ set_active()
◆ set_inverted()
◆ get_axis()
182 {
return encoderAxis; }
◆ get_ec_enabled()
◆ set_ec_enabled()
◆ get_ec_method()
◆ set_ec_method()
188 { ecMethod = method; }
◆ get_ec_threshold()
190 {
return ecThreshold; }
◆ set_ec_threshold()
191 { ecThreshold = newThreshold; }
◆ get_encoder_ticks_mm()
| FORCE_INLINE int I2CPositionEncoder::get_encoder_ticks_mm |
( |
| ) |
|
197 return encoderTicksPerUnit;
◆ get_ticks_unit()
203 {
return encoderTicksPerUnit; }
◆ set_ticks_unit()
204 { encoderTicksPerUnit = ticks; }
◆ get_type()
◆ set_type()
◆ get_stepper_ticks()
209 {
return stepperTicks; }
◆ set_stepper_ticks()
210 { stepperTicks = ticks; }









 1.8.16
1.8.16