#include <L6470_Marlin.h>
|
| static uint16_t | get_status (const uint8_t axis) |
| |
| static uint32_t | get_param (uint8_t axis, uint8_t param) |
| |
| static void | set_param (uint8_t axis, uint8_t param, uint32_t value) |
| |
| static bool | get_user_input (uint8_t &driver_count, uint8_t axis_index[3], char axis_mon[3][3], float &position_max, float &position_min, float &final_feedrate, uint8_t &kval_hold, bool over_current_flag, uint8_t &OCD_TH_val, uint8_t &STALL_TH_val, uint16_t &over_current_threshold) |
| |
| static void | error_status_decode (const uint16_t status, const uint8_t axis) |
| |
| static void | monitor_driver () |
| |
| static void | init () |
| |
| static void | init_to_defaults () |
| |
| static void | say_axis (const uint8_t axis, const bool label=true) |
| |
◆ L6470_Marlin()
| L6470_Marlin::L6470_Marlin |
( |
| ) |
|
◆ get_status()
| static uint16_t L6470_Marlin::get_status |
( |
const uint8_t |
axis | ) |
|
|
static |
◆ get_param()
| static uint32_t L6470_Marlin::get_param |
( |
uint8_t |
axis, |
|
|
uint8_t |
param |
|
) |
| |
|
static |
◆ set_param()
◆ get_user_input()
| static bool L6470_Marlin::get_user_input |
( |
uint8_t & |
driver_count, |
|
|
uint8_t |
axis_index[3], |
|
|
char |
axis_mon[3][3], |
|
|
float & |
position_max, |
|
|
float & |
position_min, |
|
|
float & |
final_feedrate, |
|
|
uint8_t & |
kval_hold, |
|
|
bool |
over_current_flag, |
|
|
uint8_t & |
OCD_TH_val, |
|
|
uint8_t & |
STALL_TH_val, |
|
|
uint16_t & |
over_current_threshold |
|
) |
| |
|
static |
◆ error_status_decode()
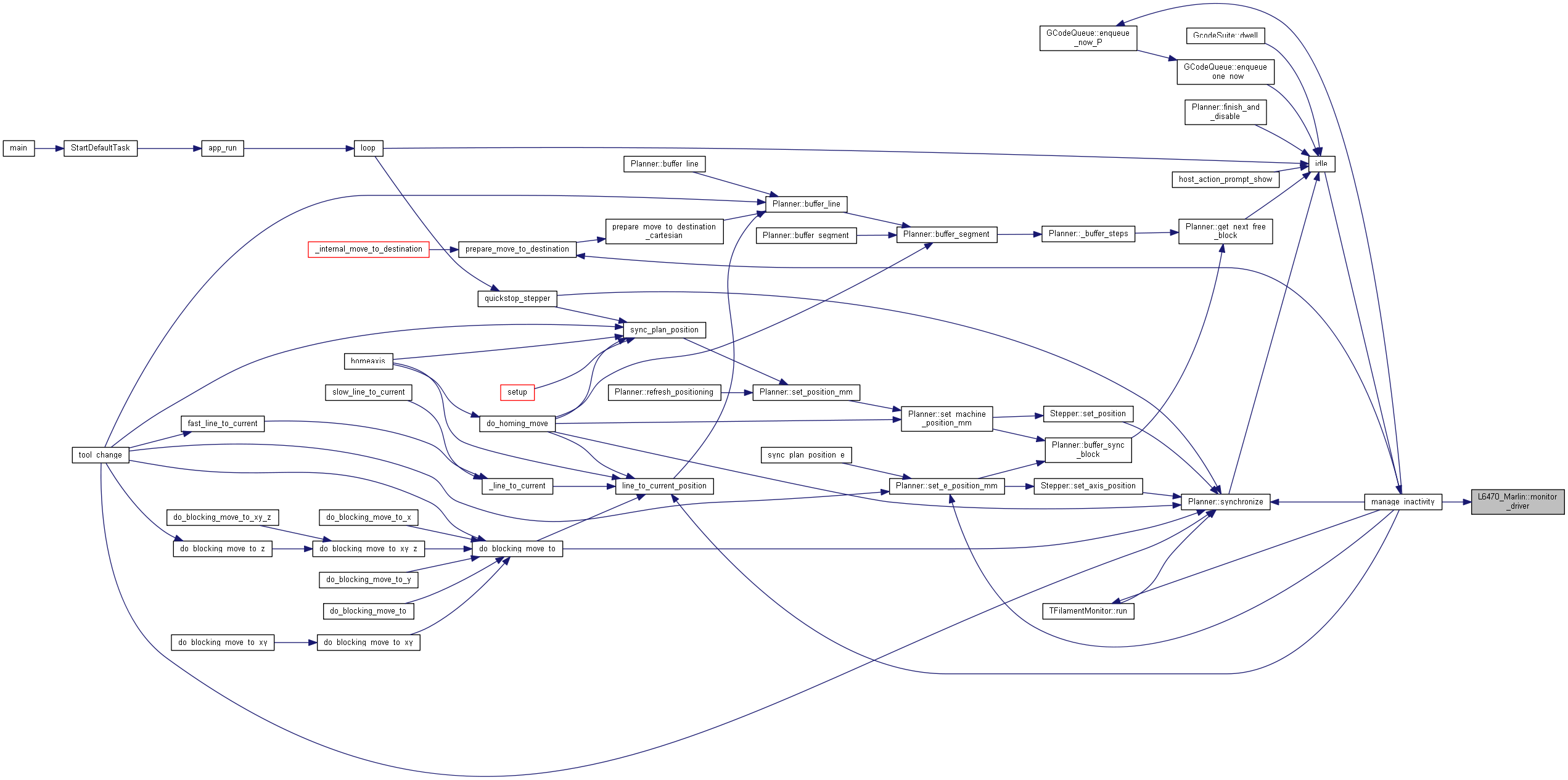
◆ monitor_driver()
| static void L6470_Marlin::monitor_driver |
( |
| ) |
|
|
static |
◆ init()
| static void L6470_Marlin::init |
( |
| ) |
|
|
static |
◆ init_to_defaults()
| static void L6470_Marlin::init_to_defaults |
( |
| ) |
|
|
static |
◆ say_axis()
◆ index_to_dir
◆ axis_xref
◆ index_to_axis
| char L6470_Marlin::index_to_axis[MAX_L6470][3] |
|
static |
◆ dir_commands
◆ spi_abort
| volatile bool L6470_Marlin::spi_abort |
|
static |
◆ spi_active
| bool L6470_Marlin::spi_active |
|
static |


 1.8.16
1.8.16 
