|
Prusa MINI Firmware overview
|
#include "filament_sensor.h"
#include "hwio_pindef.h"
#include "stm32f4xx_hal.h"
#include "gpio.h"
#include "eeprom.h"
#include "FreeRTOS.h"
#include "task.h"
#include "cmsis_os.h"
#include "marlin_client.h"
◆ send_M600_on_t
| Enumerator |
|---|
| M600_on_edge | |
| M600_on_level | |
| M600_never | |
◆ _set_state()
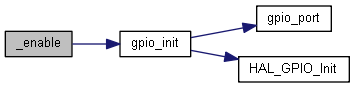
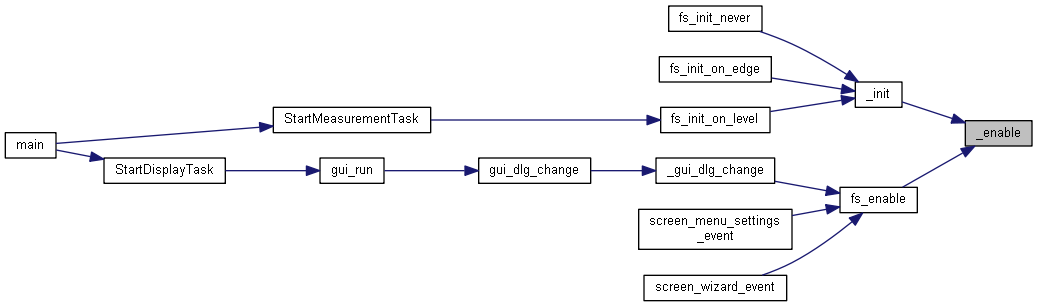
◆ _enable()
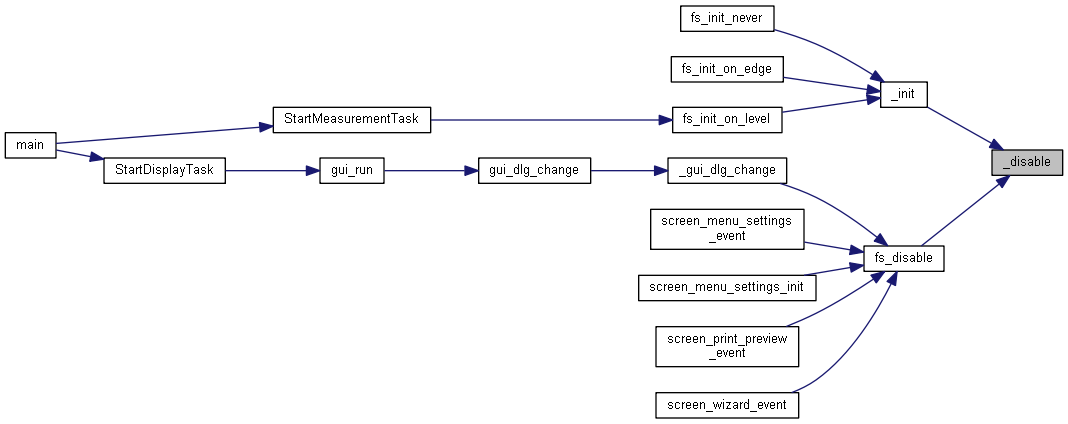
◆ _disable()
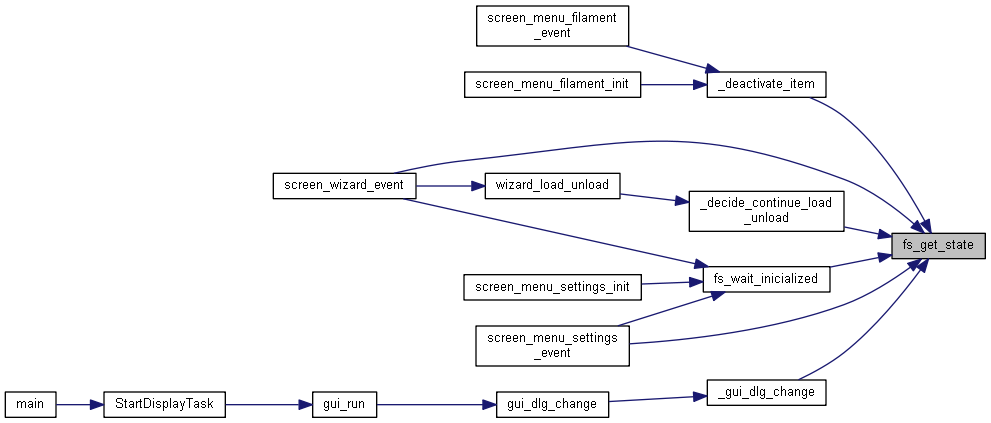
◆ fs_get_state()
◆ fs_did_filament_runout()
| int fs_did_filament_runout |
( |
| ) |
|
◆ fs_send_M600_on_edge()
| void fs_send_M600_on_edge |
( |
| ) |
|
◆ fs_send_M600_on_level()
| void fs_send_M600_on_level |
( |
| ) |
|
◆ fs_send_M600_never()
| void fs_send_M600_never |
( |
| ) |
|
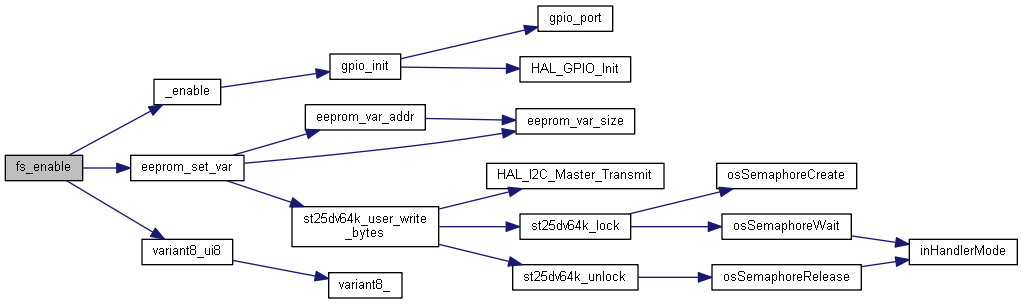
◆ fs_enable()
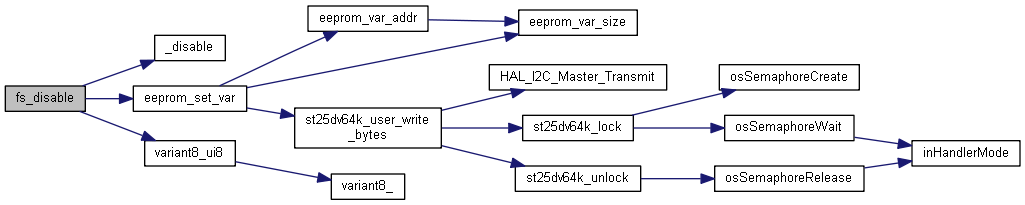
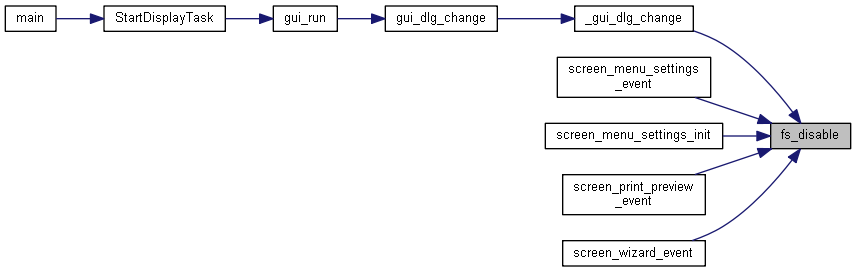
◆ fs_disable()
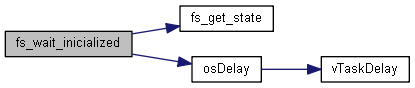
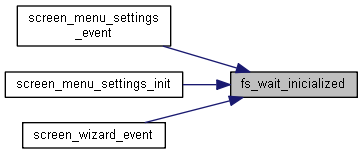
◆ fs_wait_inicialized()
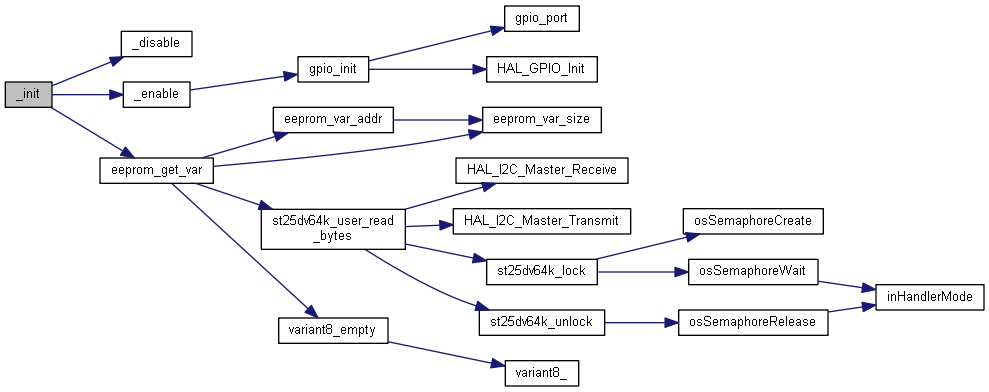
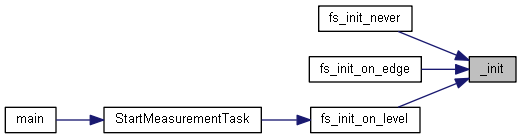
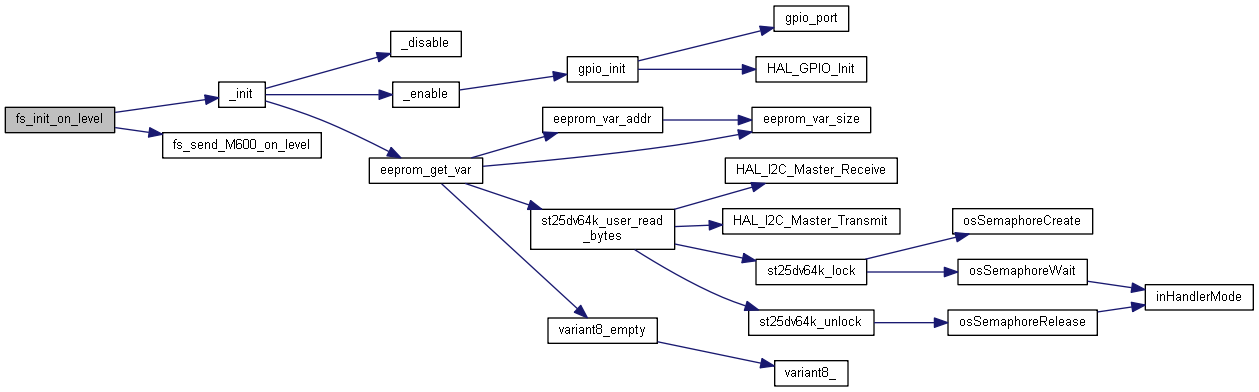
◆ _init()
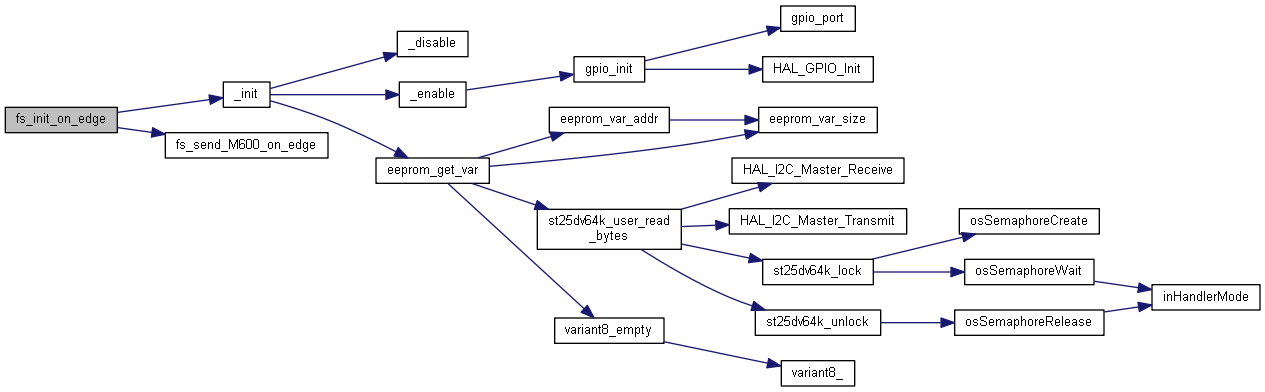
◆ fs_init_on_edge()
◆ fs_init_on_level()
| void fs_init_on_level |
( |
| ) |
|
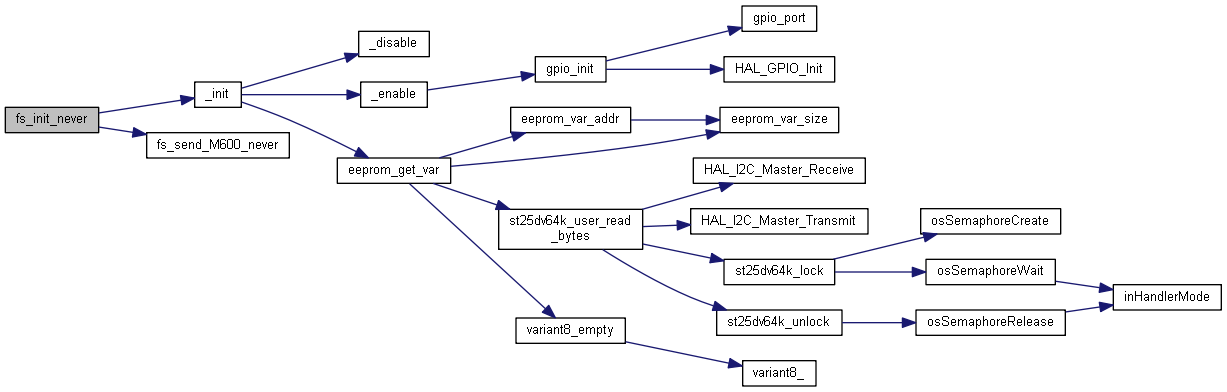
◆ fs_init_never()
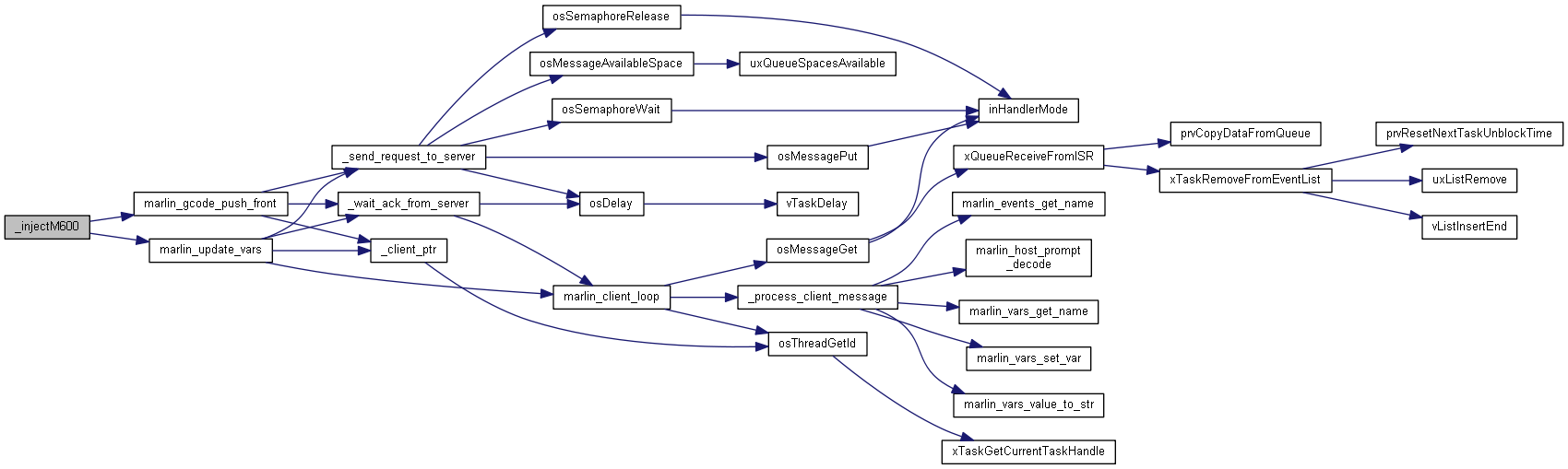
◆ _injectM600()
| static void _injectM600 |
( |
| ) |
|
|
static |
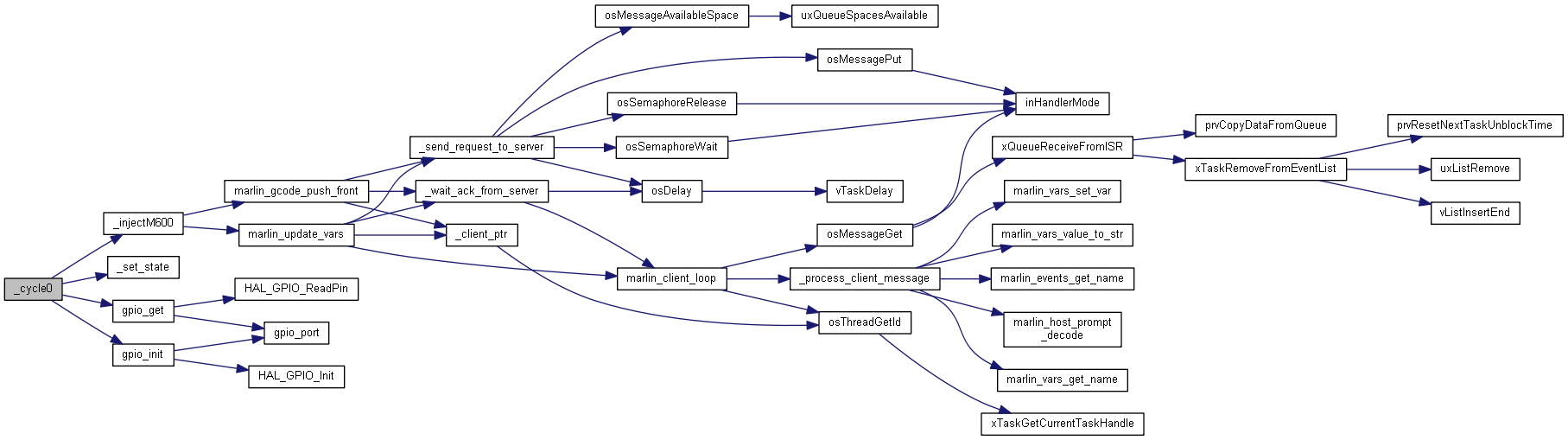
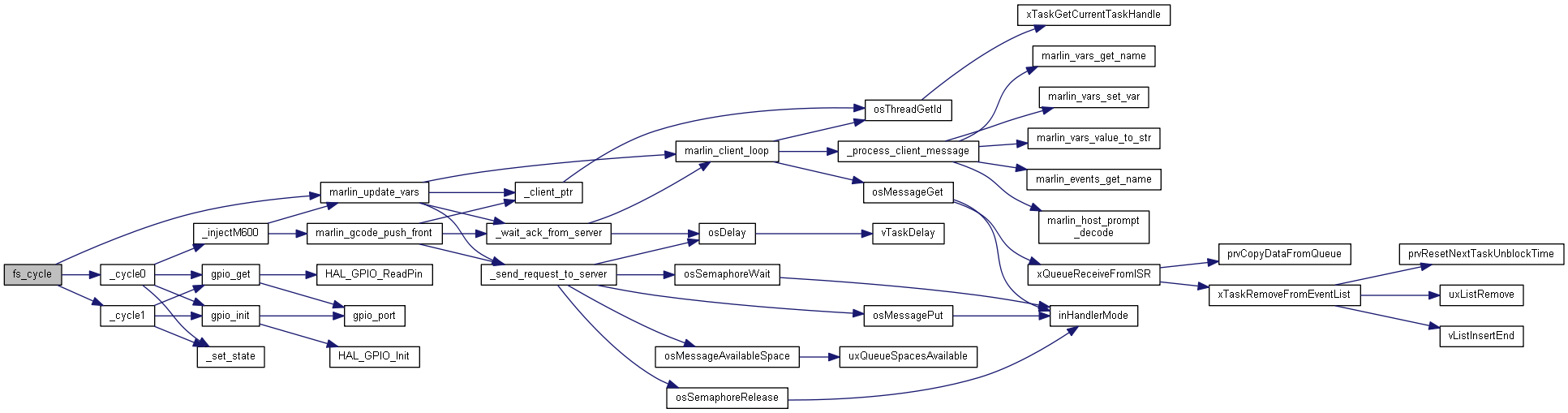
◆ _cycle0()
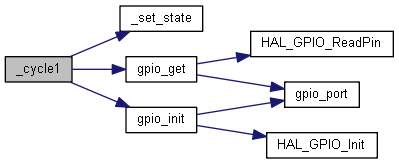
◆ _cycle1()
◆ fs_cycle()
◆ state
◆ last_state
◆ status
Definition: filament_sensor.c:27
void fs_send_M600_on_edge()
Definition: filament_sensor.c:76
variant8_t variant8_ui8(uint8_t ui8)
Definition: variant8.c:18
uint8_t meas_cycle
Definition: filament_sensor.c:35
#define EEVAR_FSENSOR_ENABLED
Definition: eeprom.h:17
send_M600_on_t
Definition: filament_sensor.c:26
Definition: filament_sensor.h:22
variant8_t eeprom_get_var(uint8_t id)
Definition: eeprom.c:75
uint8_t ui8
Definition: variant8.h:36
void marlin_gcode_push_front(const char *gcode)
Definition: marlin_client.c:222
static volatile fsensor_t state
Definition: filament_sensor.c:23
void eeprom_set_var(uint8_t id, variant8_t var)
Definition: eeprom.c:88
void fs_send_M600_never()
Definition: filament_sensor.c:84
Definition: filament_sensor.h:18
static void _disable()
Definition: filament_sensor.c:59
#define GPIO_PULLUP
Definition: stm32f4xx_hal_gpio.h:171
osStatus osDelay(uint32_t millisec)
Wait for Timeout (Time Delay)
Definition: cmsis_os.c:365
static int gpio_get(uint8_t pin8)
Definition: gpio.h:94
#define MARLIN_VAR_WAITUSER
Definition: marlin_vars.h:28
Definition: filament_sensor.h:19
#define taskENTER_CRITICAL()
Definition: task.h:217
static void _cycle1()
Definition: filament_sensor.c:177
#define GPIO_PULLDOWN
Definition: stm32f4xx_hal_gpio.h:172
static void gpio_init(uint8_t pin8, uint32_t mode, uint32_t pull, uint32_t speed)
Definition: gpio.h:102
void fs_send_M600_on_level()
Definition: filament_sensor.c:80
#define MARLIN_VAR_WAITHEAT
Definition: marlin_vars.h:27
static void _injectM600()
Definition: filament_sensor.c:139
Definition: filament_sensor.h:20
fsensor_t fs_get_state()
Definition: filament_sensor.c:67
#define GPIO_SPEED_FREQ_VERY_HIGH
Definition: stm32f4xx_hal_gpio.h:161
marlin_vars_t * marlin_update_vars(uint64_t msk)
Definition: marlin_client.c:368
uint8_t wait_user
Definition: marlin_vars.h:92
#define PIN_FSENSOR
Definition: hwio_pindef.h:44
#define MARLIN_VAR_MSK(v_id)
Definition: marlin_vars.h:35
static void _set_state(fsensor_t st)
Definition: filament_sensor.c:44
uint8_t M600_sent
Definition: filament_sensor.c:33
Definition: filament_sensor.c:29
uint8_t send_M600_on
Definition: filament_sensor.c:34
#define MARLIN_VAR_SD_PRINT
Definition: marlin_vars.h:29
Definition: filament_sensor.c:28
static status_t status
Definition: filament_sensor.c:37
Definition: filament_sensor.h:21
Definition: marlin_vars.h:77
static volatile fsensor_t last_state
Definition: filament_sensor.c:24
static void _cycle0()
Definition: filament_sensor.c:147
fsensor_t
Definition: filament_sensor.h:17
#define taskEXIT_CRITICAL()
Definition: task.h:232
#define GPIO_MODE_INPUT
Definition: stm32f4xx_hal_gpio.h:135
static void _init()
Definition: filament_sensor.c:115
uint8_t sd_printing
Definition: marlin_vars.h:93
static void _enable()
Definition: filament_sensor.c:52







 1.8.16
1.8.16