|
Prusa MINI Firmware overview
|
#include "../core/types.h"Go to the source code of this file.
Classes | |
| struct | vector_3 |
| struct | matrix_3x3 |
Functions | |
| void | apply_rotation_xyz (const matrix_3x3 &rotationMatrix, float &x, float &y, float &z) |
| FORCE_INLINE void | apply_rotation_xyz (const matrix_3x3 &rotationMatrix, xyz_pos_t &pos) |
| void apply_rotation_xyz | ( | const matrix_3x3 & | matrix, |
| float & | _x, | ||
| float & | _y, | ||
| float & | _z | ||
| ) |

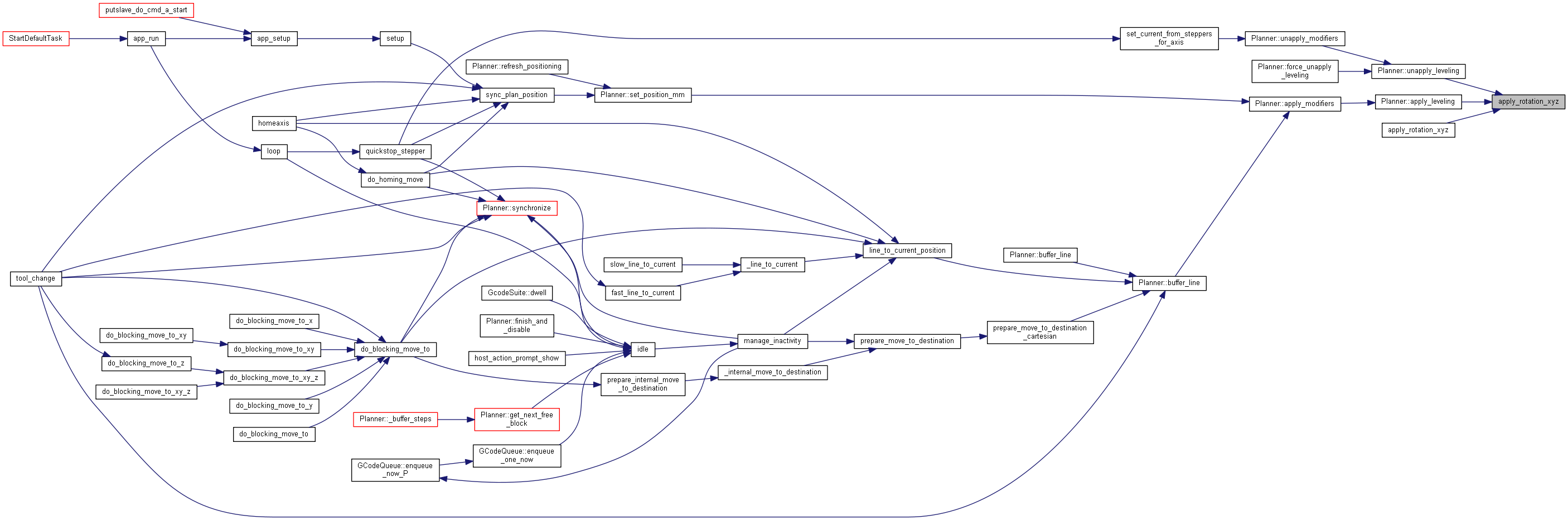
| FORCE_INLINE void apply_rotation_xyz | ( | const matrix_3x3 & | rotationMatrix, |
| xyz_pos_t & | pos | ||
| ) |

 1.8.16
1.8.16 
