|
Prusa MINI Firmware overview
|
#include <vector_3.h>
◆ create_from_rows()
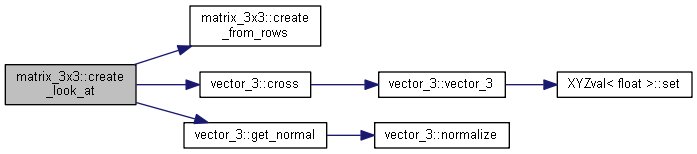
◆ create_look_at()
◆ transpose()
134 for (
uint8_t j = 0; j < 3; j++)
◆ set_to_identity()
| void matrix_3x3::set_to_identity |
( |
| ) |
|
◆ debug()
140 if (title !=
nullptr) {
145 for (
uint8_t j = 0; j < 3; j++) {
◆ vectors
T z
Definition: types.h:286
#define SERIAL_CHAR(x)
Definition: serial.h:69
T x
Definition: types.h:286
vector_3 get_normal() const
Definition: vector_3.cpp:61
uint8_t i
Definition: screen_test_graph.c:72
Definition: vector_3.h:73
static vector_3 cross(const vector_3 &a, const vector_3 &b)
Definition: vector_3.cpp:54
#define SERIAL_ECHO_F(V...)
Definition: serial.h:71
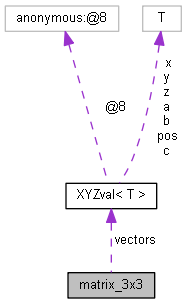
abc_float_t vectors[3]
Definition: vector_3.h:74
const uint8_t[]
Definition: 404_html.c:3
#define SERIAL_EOL()
Definition: serial.h:181
Definition: vector_3.h:47
static matrix_3x3 create_from_rows(const vector_3 &row_0, const vector_3 &row_1, const vector_3 &row_2)
Definition: vector_3.cpp:101
void serialprintPGM(PGM_P str)
Definition: serial.cpp:35


 1.8.16
1.8.16 


