|
Prusa MINI Firmware overview
|
◆ USBH_MSC_BOT_REQ_Reset()
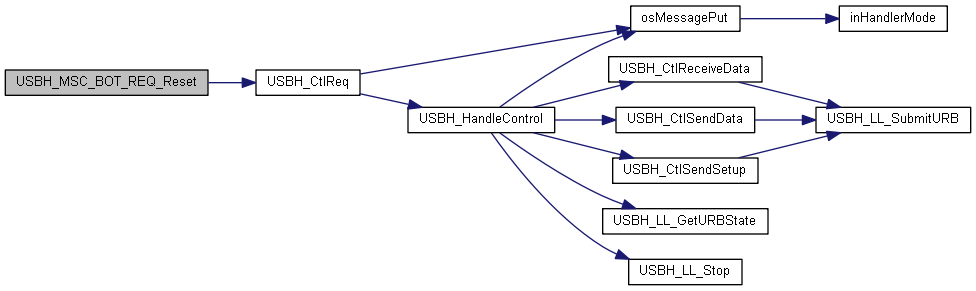
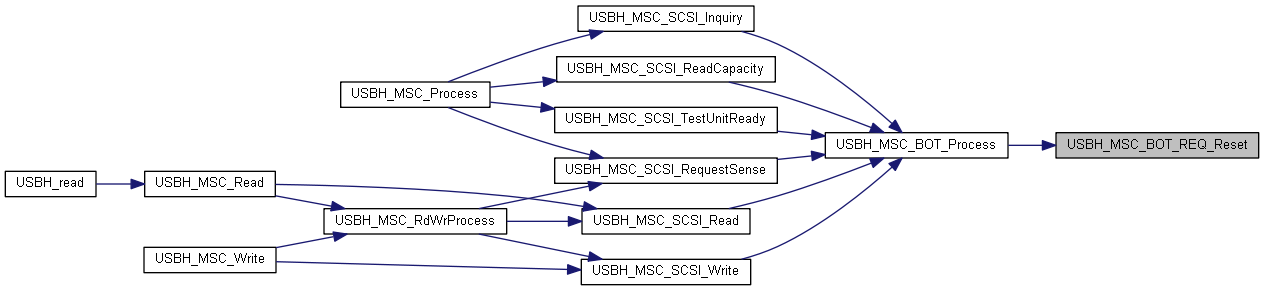
USBH_MSC_BOT_REQ_Reset The function the MSC BOT Reset request.
- Parameters
-
- Return values
-
113 USB_REQ_RECIPIENT_INTERFACE;
◆ USBH_MSC_BOT_REQ_GetMaxLUN()
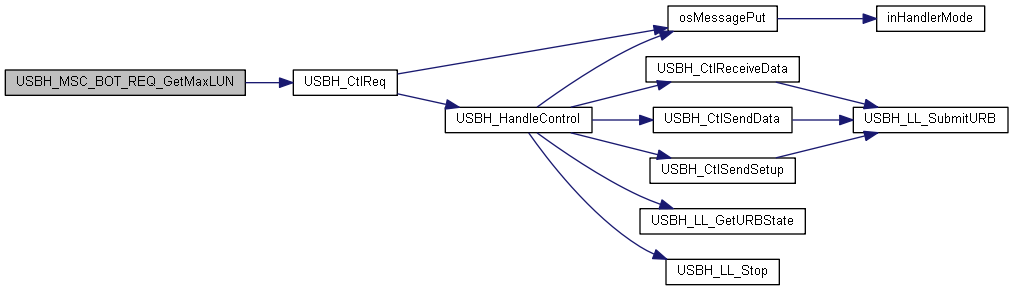
USBH_MSC_BOT_REQ_GetMaxLUN The function the MSC BOT GetMaxLUN request.
- Parameters
-
| phost | Host handle |
| Maxlun | pointer to Maxlun variable |
- Return values
-
133 USB_REQ_RECIPIENT_INTERFACE;
◆ USBH_MSC_BOT_Init()
USBH_MSC_BOT_Init The function Initializes the BOT protocol.
- Parameters
-
- Return values
-
◆ USBH_MSC_BOT_Process()
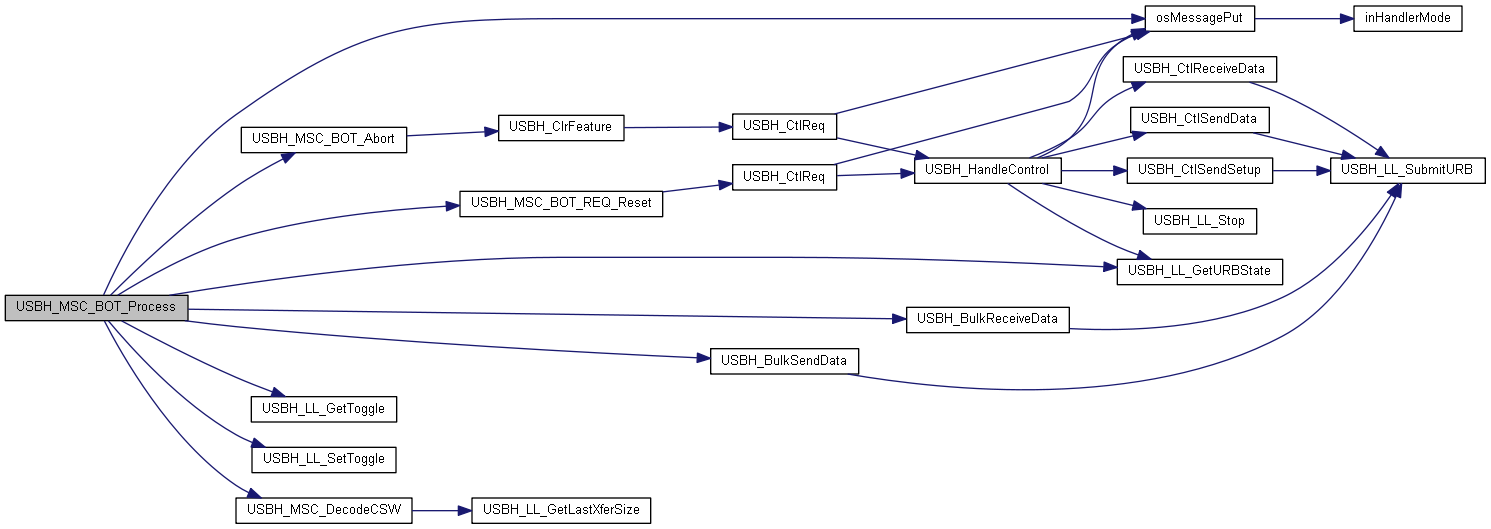
USBH_MSC_BOT_Process The function handle the BOT protocol.
- Parameters
-
| phost | Host handle |
| lun | Logical Unit Number |
- Return values
-
220 #if (USBH_USE_OS == 1)
229 #if (USBH_USE_OS == 1)
236 #if (USBH_USE_OS == 1)
284 #if (USBH_USE_OS == 1)
301 #if (USBH_USE_OS == 1)
349 #if (USBH_USE_OS == 1)
358 #if (USBH_USE_OS == 1)
373 #if (USBH_USE_OS == 1)
408 #if (USBH_USE_OS == 1)
415 #if (USBH_USE_OS == 1)
◆ USBH_MSC_BOT_Error()
USB_Setup_TypeDef setup
Definition: usbh_def.h:412
uint8_t LUN
Definition: usbh_msc_bot.h:110
USBH_StatusTypeDef USBH_BulkSendData(USBH_HandleTypeDef *phost, uint8_t *buff, uint16_t length, uint8_t hc_num, uint8_t do_ping)
USBH_BulkSendData Sends the Bulk Packet to the device.
Definition: usbh_ioreq.c:186
Definition: usbh_def.h:308
bool error
Definition: auto_build.py:637
#define BOT_CBW_TAG
Definition: usbh_msc_bot.h:155
Definition: usbh_def.h:387
Definition: usbh_msc_bot.h:96
#define BOT_CBW_LENGTH
Definition: usbh_msc_bot.h:157
uint8_t bRequest
Definition: usbh_def.h:222
uint8_t data[13]
Definition: usbh_msc_bot.h:127
uint32_t Tag
Definition: usbh_msc_bot.h:107
USBH_StatusTypeDef USBH_CtlReq(USBH_HandleTypeDef *phost, uint8_t *buff, uint16_t length)
USBH_CtlReq USBH_CtlReq sends a control request and provide the status after completion of the reques...
Definition: usbh_ctlreq.c:531
Definition: usbh_msc_bot.h:91
uint8_t data[31]
Definition: usbh_msc_bot.h:114
Definition: usbh_msc_bot.h:95
#define BOT_DIR_IN
Definition: usbh_msc_bot.h:165
BOT_CBWTypeDef cbw
Definition: usbh_msc_bot.h:137
#define BOT_CBW_SIGNATURE
Definition: usbh_msc_bot.h:154
uint16_t_uint8_t wIndex
Definition: usbh_def.h:224
Definition: usbh_def.h:386
struct BOT_CBWTypeDef::__CBW field
USBH_StatusTypeDef USBH_BulkReceiveData(USBH_HandleTypeDef *phost, uint8_t *buff, uint16_t length, uint8_t hc_num)
USBH_BulkReceiveData Receives IN bulk packet from device.
Definition: usbh_ioreq.c:218
BOT_CMDStateTypeDef cmd_state
Definition: usbh_msc_bot.h:136
uint16_t OutEpSize
Definition: usbh_msc.h:123
BOT_HandleTypeDef hbot
Definition: usbh_msc.h:129
void * pData
Definition: usbh_def.h:446
USBH_CtrlTypeDef Control
Definition: usbh_def.h:455
Definition: usbh_def.h:385
uint16_t_uint8_t wValue
Definition: usbh_def.h:223
uint8_t InPipe
Definition: usbh_msc.h:119
Definition: usbh_msc_bot.h:94
uint8_t USBH_LL_GetToggle(USBH_HandleTypeDef *phost, uint8_t)
Return the current toggle of a pipe.
Definition: usbh_conf.c:583
uint16_t_uint8_t wLength
Definition: usbh_def.h:225
Definition: usbh_def.h:396
Definition: usbh_msc_bot.h:92
Definition: usbh_def.h:304
osStatus osMessagePut(osMessageQId queue_id, uint32_t info, uint32_t millisec)
Put a Message to a Queue.
Definition: cmsis_os.c:1113
Definition: usbh_msc_bot.h:81
#define USB_REQ_TYPE_CLASS
Definition: usbd_def.h:74
Definition: usbh_msc_bot.h:72
USBH_StatusTypeDef USBH_MSC_BOT_REQ_Reset(USBH_HandleTypeDef *phost)
USBH_MSC_BOT_REQ_Reset The function the MSC BOT Reset request.
Definition: usbh_msc_bot.c:109
uint8_t Flags
Definition: usbh_msc_bot.h:109
uint32_t Signature
Definition: usbh_msc_bot.h:106
Definition: usbh_def.h:390
USBH_URBStateTypeDef USBH_LL_GetURBState(USBH_HandleTypeDef *phost, uint8_t)
Get a URB state from the low level driver.
Definition: usbh_conf.c:519
BOT_CSWTypeDef csw
Definition: usbh_msc_bot.h:139
BOT_CSWStatusTypeDef
Definition: usbh_msc_bot.h:78
const uint8_t[]
Definition: 404_html.c:3
Definition: usbh_msc_bot.h:97
struct _USB_Setup::_SetupPkt_Struc b
USBH_StatusTypeDef
Definition: usbh_def.h:302
Definition: usbh_msc_bot.h:90
static BOT_CSWStatusTypeDef USBH_MSC_DecodeCSW(USBH_HandleTypeDef *phost)
USBH_MSC_BOT_DecodeCSW This function decodes the CSW received by the device and updates the same to u...
Definition: usbh_msc_bot.c:514
BOT_StateTypeDef state
Definition: usbh_msc_bot.h:134
uint16_t InEpSize
Definition: usbh_msc.h:124
USBH_StatusTypeDef USBH_LL_SetToggle(USBH_HandleTypeDef *phost, uint8_t, uint8_t)
Set toggle for a pipe.
Definition: usbh_conf.c:564
uint8_t * pbuf
Definition: usbh_msc_bot.h:141
static status_t status
Definition: filament_sensor.c:37
#define USB_H2D
Definition: usbh_def.h:108
Definition: usbh_msc_bot.h:98
#define USB_REQ_BOT_RESET
Definition: usbh_msc.h:148
uint8_t OutPipe
Definition: usbh_msc.h:120
uint16_t w
Definition: usbh_def.h:204
Definition: usbh_def.h:306
#define USB_D2H
Definition: usbh_def.h:109
Definition: usbh_def.h:305
Definition: usbh_msc_bot.h:82
USBH_URBStateTypeDef
Definition: usbh_def.h:384
uint8_t bmRequestType
Definition: usbh_def.h:221
USBH_ClassTypeDef * pActiveClass
Definition: usbh_def.h:458
Definition: usbh_msc_bot.h:89
uint32_t DataTransferLength
Definition: usbh_msc_bot.h:108
#define BOT_DIR_OUT
Definition: usbh_msc_bot.h:166
Definition: usbh_msc_bot.h:88
#define USB_REQ_GET_MAX_LUN
Definition: usbh_msc.h:149
#define BOT_CSW_LENGTH
Definition: usbh_msc_bot.h:158
Definition: usbh_msc.h:116
static USBH_StatusTypeDef USBH_MSC_BOT_Abort(USBH_HandleTypeDef *phost, uint8_t lun, uint8_t dir)
USBH_MSC_BOT_Abort The function handle the BOT Abort process.
Definition: usbh_msc_bot.c:475
#define USB_REQ_DIR_MASK
Definition: usbh_def.h:107
Definition: usbh_msc_bot.h:93



 1.8.16
1.8.16 
