Prusa MINI Firmware overview
Main Page
Modules
Classes
Files
File List
File Members
Functions
vector_3.cpp File Reference
#include "
../inc/MarlinConfig.h
"
#include "
vector_3.h
"
#include <
math.h
>
Functions
void
apply_rotation_xyz
(
const
matrix_3x3
&matrix, float &_x, float &_y, float &_z)
Function Documentation
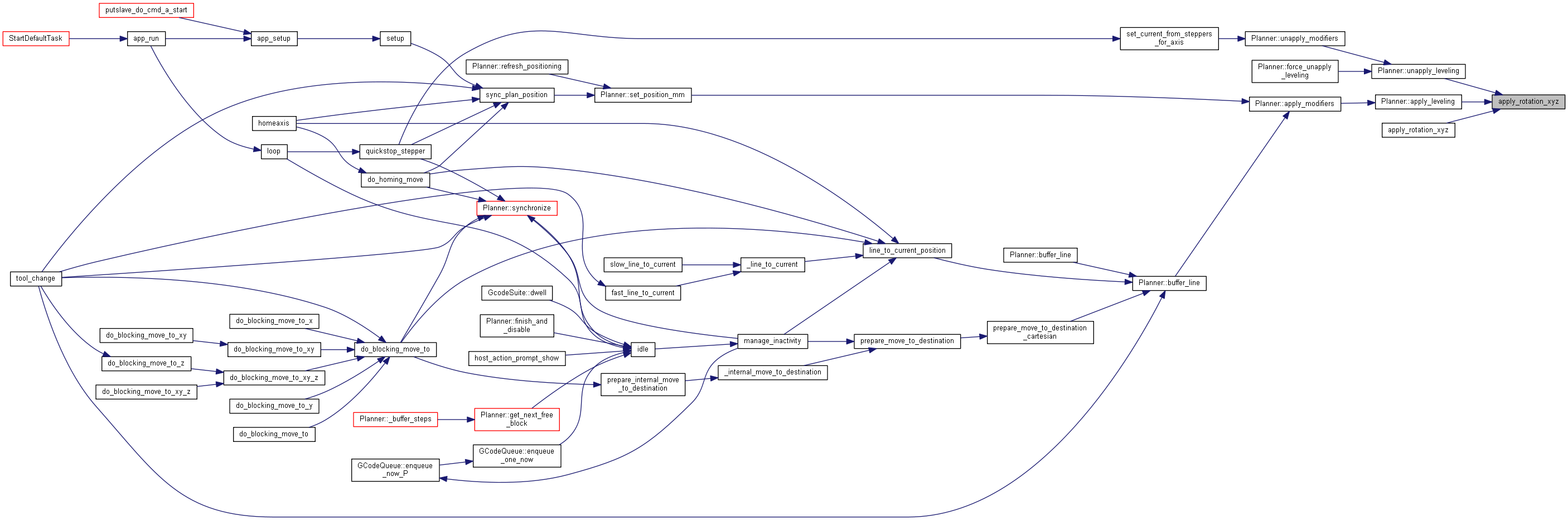
◆
apply_rotation_xyz()
void
apply_rotation_xyz
(
const
matrix_3x3
&
matrix
,
float &
_x
,
float &
_y
,
float &
_z
)
matrix_3x3
88
{
89
vector_3
vec =
vector_3
(_x, _y, _z); vec.
apply_rotation
(matrix);
90
_x = vec.
x
; _y = vec.
y
; _z = vec.
z
;
91
}
Here is the call graph for this function:
Here is the caller graph for this function:
XYZval::z
T z
Definition:
types.h:286
XYZval::x
T x
Definition:
types.h:286
vector_3::apply_rotation
void apply_rotation(const matrix_3x3 &matrix)
Definition:
vector_3.cpp:72
XYZval::y
T y
Definition:
types.h:286
vector_3
Definition:
vector_3.h:47
Prusa-Firmware-Buddy-Private1
lib
Marlin
Marlin
src
libs
vector_3.cpp
Generated by
1.8.16

 1.8.16
1.8.16 
