#include <I2CPositionEncoder.h>
|
| static void | init () |
| |
| static void | update () |
| |
| static void | homed (const AxisEnum axis) |
| |
| static void | unhomed (const AxisEnum axis) |
| |
| static void | report_position (const int8_t idx, const bool units, const bool noOffset) |
| |
| static void | report_status (const int8_t idx) |
| |
| static void | report_error (const int8_t idx) |
| |
| static void | test_axis (const int8_t idx) |
| |
| static void | calibrate_steps_mm (const int8_t idx, const int iterations) |
| |
| static void | change_module_address (const uint8_t oldaddr, const uint8_t newaddr) |
| |
| static void | report_module_firmware (const uint8_t address) |
| |
| static void | report_error_count (const int8_t idx, const AxisEnum axis) |
| |
| static void | reset_error_count (const int8_t idx, const AxisEnum axis) |
| |
| static void | enable_ec (const int8_t idx, const bool enabled, const AxisEnum axis) |
| |
| static void | set_ec_threshold (const int8_t idx, const float newThreshold, const AxisEnum axis) |
| |
| static void | get_ec_threshold (const int8_t idx, const AxisEnum axis) |
| |
| static int8_t | idx_from_axis (const AxisEnum axis) |
| |
| static int8_t | idx_from_addr (const uint8_t addr) |
| |
| static int8_t | parse () |
| |
| static void | M860 () |
| |
| static void | M861 () |
| |
| static void | M862 () |
| |
| static void | M863 () |
| |
| static void | M864 () |
| |
| static void | M865 () |
| |
| static void | M866 () |
| |
| static void | M867 () |
| |
| static void | M868 () |
| |
| static void | M869 () |
| |
◆ init()
| static void I2CPositionEncodersMgr::init |
( |
| ) |
|
|
static |
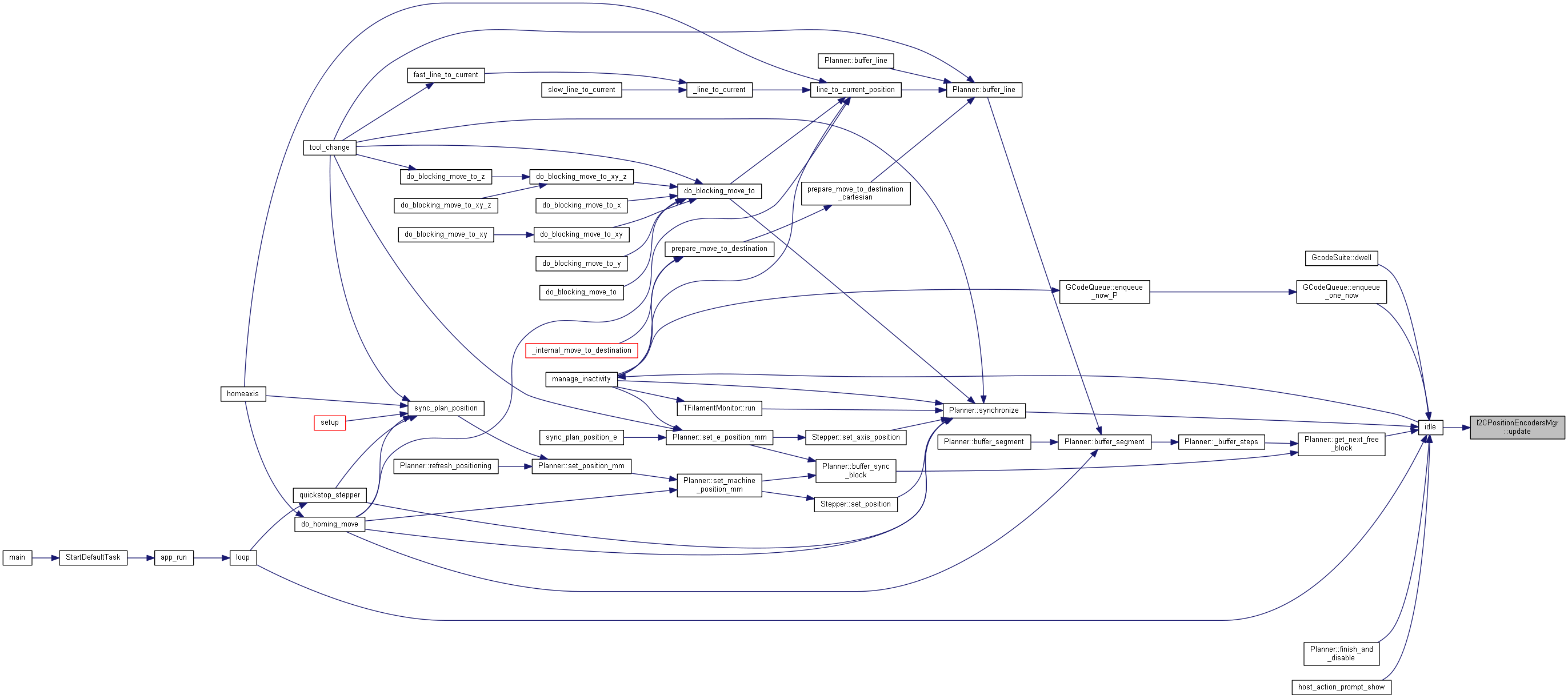
◆ update()
| static void I2CPositionEncodersMgr::update |
( |
| ) |
|
|
static |
◆ homed()
◆ unhomed()
◆ report_position()
| static void I2CPositionEncodersMgr::report_position |
( |
const int8_t |
idx, |
|
|
const bool |
units, |
|
|
const bool |
noOffset |
|
) |
| |
|
static |
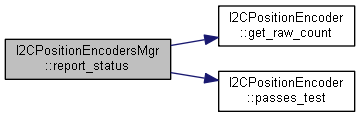
◆ report_status()
| static void I2CPositionEncodersMgr::report_status |
( |
const int8_t |
idx | ) |
|
|
static |
◆ report_error()
| static void I2CPositionEncodersMgr::report_error |
( |
const int8_t |
idx | ) |
|
|
static |
◆ test_axis()
| static void I2CPositionEncodersMgr::test_axis |
( |
const int8_t |
idx | ) |
|
|
static |
◆ calibrate_steps_mm()
| static void I2CPositionEncodersMgr::calibrate_steps_mm |
( |
const int8_t |
idx, |
|
|
const int |
iterations |
|
) |
| |
|
static |
◆ change_module_address()
◆ report_module_firmware()
| static void I2CPositionEncodersMgr::report_module_firmware |
( |
const uint8_t |
address | ) |
|
|
static |
◆ report_error_count()
◆ reset_error_count()
◆ enable_ec()
◆ set_ec_threshold()
◆ get_ec_threshold()
◆ idx_from_axis()
| static int8_t I2CPositionEncodersMgr::idx_from_axis |
( |
const AxisEnum |
axis | ) |
|
|
static |
◆ idx_from_addr()
| static int8_t I2CPositionEncodersMgr::idx_from_addr |
( |
const uint8_t |
addr | ) |
|
|
static |
300 if (
encoders[
i].get_address() == addr)
return i;
◆ parse()
| static int8_t I2CPositionEncodersMgr::parse |
( |
| ) |
|
|
static |
◆ M860()
| static void I2CPositionEncodersMgr::M860 |
( |
| ) |
|
|
static |
◆ M861()
| static void I2CPositionEncodersMgr::M861 |
( |
| ) |
|
|
static |
◆ M862()
| static void I2CPositionEncodersMgr::M862 |
( |
| ) |
|
|
static |
◆ M863()
| static void I2CPositionEncodersMgr::M863 |
( |
| ) |
|
|
static |
◆ M864()
| static void I2CPositionEncodersMgr::M864 |
( |
| ) |
|
|
static |
◆ M865()
| static void I2CPositionEncodersMgr::M865 |
( |
| ) |
|
|
static |
◆ M866()
| static void I2CPositionEncodersMgr::M866 |
( |
| ) |
|
|
static |
◆ M867()
| static void I2CPositionEncodersMgr::M867 |
( |
| ) |
|
|
static |
◆ M868()
| static void I2CPositionEncodersMgr::M868 |
( |
| ) |
|
|
static |
◆ M869()
| static void I2CPositionEncodersMgr::M869 |
( |
| ) |
|
|
static |
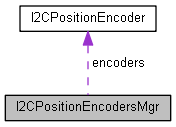
◆ encoders







 1.8.16
1.8.16