|
Prusa MINI Firmware overview
|
◆ f_SH_on_load()
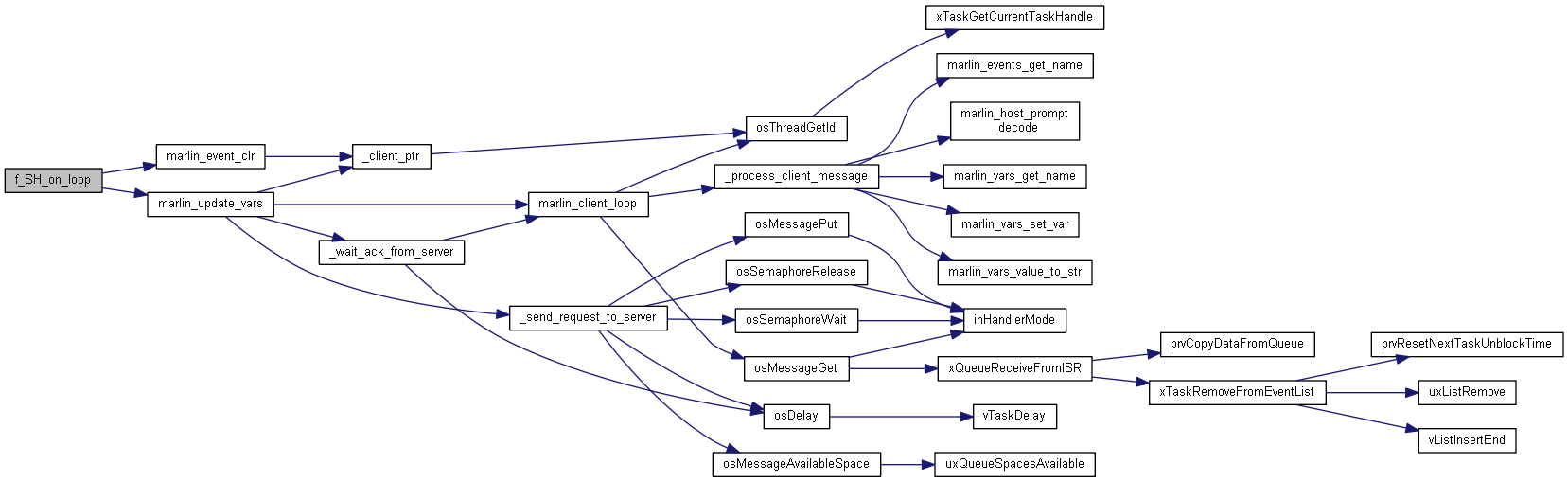
◆ f_SH_on_loop()
◆ f_SH_on_timeout()
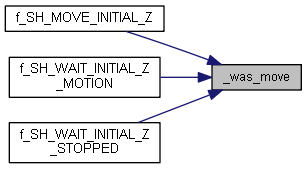
◆ _was_move()
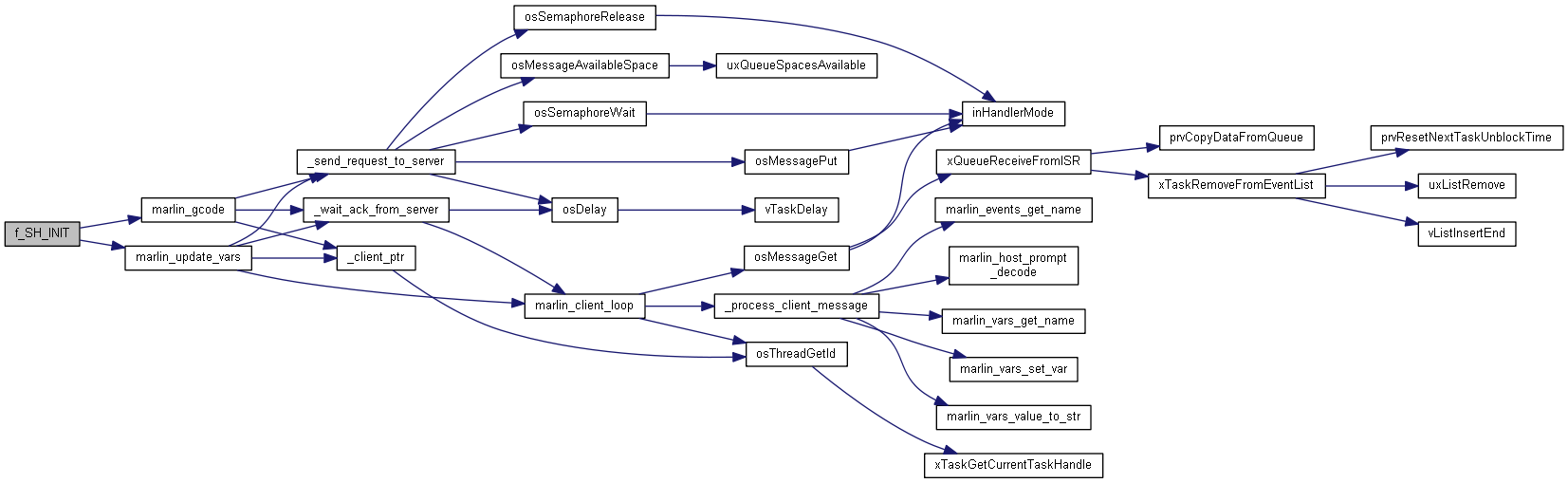
◆ f_SH_INIT()
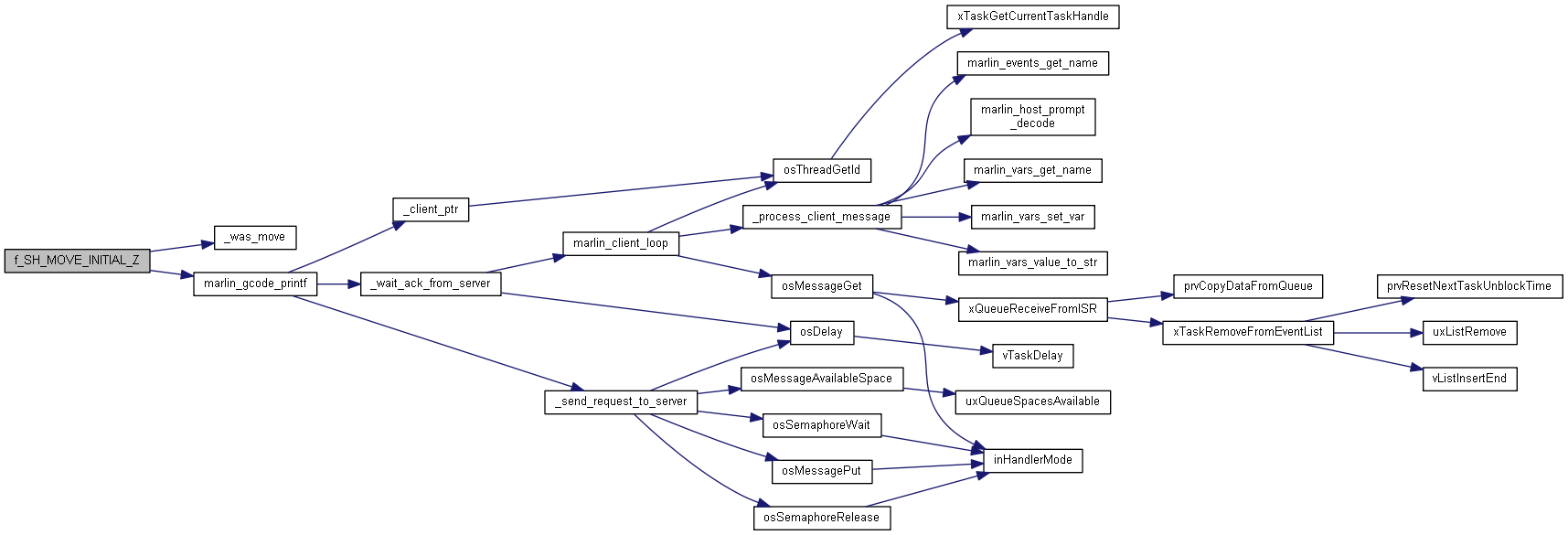
◆ f_SH_MOVE_INITIAL_Z()
◆ f_SH_WAIT_INITIAL_Z_MOTION()
◆ f_SH_WAIT_INITIAL_Z_STOPPED()
◆ f_SH_WAIT_E_MOTION()
◆ f_SH_WAIT_E_STOPPED()
◆ f_SH_WAIT_TEMP()
135 diff_temp = 100.0F + diff_temp / 2;
136 if (diff_temp > 99.0
F)
138 if (diff_temp < 0.0
F)
140 return (
int)diff_temp;
◆ f_SH_WAIT_E_MOTION__WAIT_TEMP()
◆ ld_purge_amount
| const float ld_purge_amount = 40.0F |
◆ txt_stop
| const char* txt_stop[] = { "STOP" } |
|
static |
◆ txt_cont
| const char* txt_cont[] = { "CONTINUE" } |
|
static |
◆ txt_none
| const char* txt_none[] = { "" } |
|
static |
◆ bt_stop_ena
◆ bt_stop_dis
◆ bt_cont_ena
◆ bt_cont_dis
◆ bt_none
#define BT_ENABLED
Definition: window_dlg_statemachine.h:15
uint8_t flags
Definition: window_dlg_statemachine.h:38
#define BT_AUTOEXIT
Definition: window_dlg_statemachine.h:17
static const char * txt_none[]
Definition: window_dlg_loadunload_shared.c:18
#define MARLIN_VAR_MOTION
Definition: marlin_vars.h:8
void window_dlg_statemachine_event_1bt(window_dlg_statemachine_t *window, uint8_t event, void *param)
Definition: window_dlg_statemachine.c:235
float z_start
Definition: window_dlg_loadunload_shared.h:18
int8_t phase
Definition: window_dlg_statemachine.h:39
static const char * txt_cont[]
Definition: window_dlg_loadunload_shared.c:17
#define NULL
Definition: usbd_def.h:53
#define F(str)
Definition: UHS_macros.h:164
uint32_t HAL_GetTick(void)
Provides a tick value in millisecond.
Definition: stm32f4xx_hal.c:339
float temp_nozzle
Definition: marlin_vars.h:83
float z_min_extr_pos
Definition: window_dlg_loadunload_shared.h:16
Definition: window_dlg_statemachine.h:52
int _was_move(_dlg_ld_vars *additional_vars)
Definition: window_dlg_loadunload_shared.c:63
#define MARLIN_VAR_TEMP_NOZ
Definition: marlin_vars.h:19
#define MARLIN_EVT_CommandEnd
Definition: marlin_events.h:34
Definition: window_dlg_statemachine.h:51
float target_nozzle
Definition: marlin_vars.h:85
void marlin_gcode(const char *gcode)
Definition: marlin_client.c:195
#define MARLIN_VAR_POS_Z
Definition: marlin_vars.h:17
#define MARLIN_VAR_POS_E
Definition: marlin_vars.h:18
marlin_vars_t * marlin_update_vars(uint64_t msk)
Definition: marlin_client.c:368
void window_dlg_statemachine_draw_0bt(window_dlg_statemachine_t *window)
Definition: window_dlg_statemachine.c:94
#define MARLIN_VAR_MSK(v_id)
Definition: marlin_vars.h:35
#define DLG_CH_CMD
Definition: window_dlg_statemachine.h:20
static const char * txt_stop[]
Definition: window_dlg_loadunload_shared.c:16
#define MARLIN_VAR_INDEX_Z
Definition: marlin_vars.h:66
float pos[4]
Definition: marlin_vars.h:82
#define MARLIN_VAR_TTEM_NOZ
Definition: marlin_vars.h:21
#define MARLIN_VAR_MOTION_MSK_E
Definition: marlin_vars.h:71
void window_dlg_statemachine_draw_1bt(window_dlg_statemachine_t *window)
Definition: window_dlg_statemachine.c:87
uint32_t tick_part_start
Definition: window_dlg_statemachine.h:46
marlin_vars_t * p_marlin_vars
Definition: window_dlg_loadunload_shared.h:15
int marlin_gcode_printf(const char *format,...)
Definition: marlin_client.c:206
float initial_move
Definition: window_dlg_loadunload_shared.h:17
uint8_t motion
Definition: marlin_vars.h:78
int marlin_event_clr(uint8_t evt_id)
Definition: marlin_client.c:252
#define MARLIN_VAR_MOTION_MSK_Z
Definition: marlin_vars.h:70



 1.8.16
1.8.16 


