|
Prusa MINI Firmware overview
|
#include <stdlib.h>
#include <string.h>
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
|
| static PRIVILEGED_FUNCTION void | prvUnlockQueue (Queue_t *const pxQueue) |
| |
| static PRIVILEGED_FUNCTION BaseType_t | prvIsQueueEmpty (const Queue_t *pxQueue) |
| |
| static PRIVILEGED_FUNCTION BaseType_t | prvIsQueueFull (const Queue_t *pxQueue) |
| |
| static PRIVILEGED_FUNCTION BaseType_t | prvCopyDataToQueue (Queue_t *const pxQueue, const void *pvItemToQueue, const BaseType_t xPosition) |
| |
| static PRIVILEGED_FUNCTION void | prvCopyDataFromQueue (Queue_t *const pxQueue, void *const pvBuffer) |
| |
| static PRIVILEGED_FUNCTION void | prvInitialiseNewQueue (const UBaseType_t uxQueueLength, const UBaseType_t uxItemSize, uint8_t *pucQueueStorage, const uint8_t ucQueueType, Queue_t *pxNewQueue) |
| |
| BaseType_t | xQueueGenericReset (QueueHandle_t xQueue, BaseType_t xNewQueue) |
| |
| BaseType_t | xQueueGenericSend (QueueHandle_t xQueue, const void *const pvItemToQueue, TickType_t xTicksToWait, const BaseType_t xCopyPosition) |
| |
| BaseType_t | xQueueGenericSendFromISR (QueueHandle_t xQueue, const void *const pvItemToQueue, BaseType_t *const pxHigherPriorityTaskWoken, const BaseType_t xCopyPosition) |
| |
| BaseType_t | xQueueGiveFromISR (QueueHandle_t xQueue, BaseType_t *const pxHigherPriorityTaskWoken) |
| |
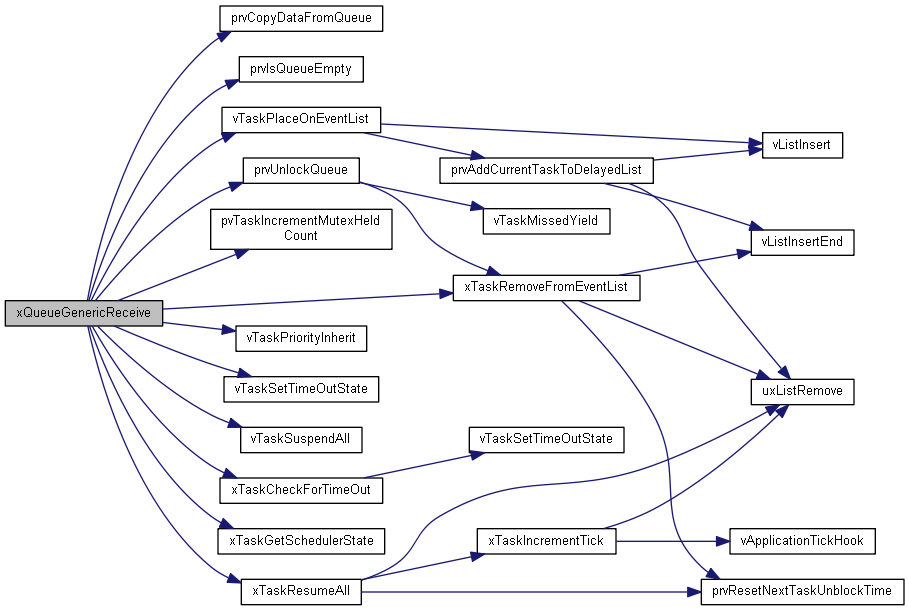
| BaseType_t | xQueueGenericReceive (QueueHandle_t xQueue, void *const pvBuffer, TickType_t xTicksToWait, const BaseType_t xJustPeeking) |
| |
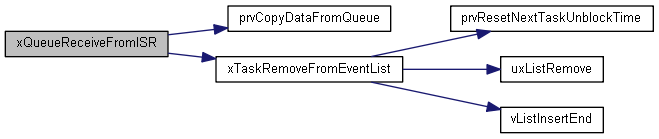
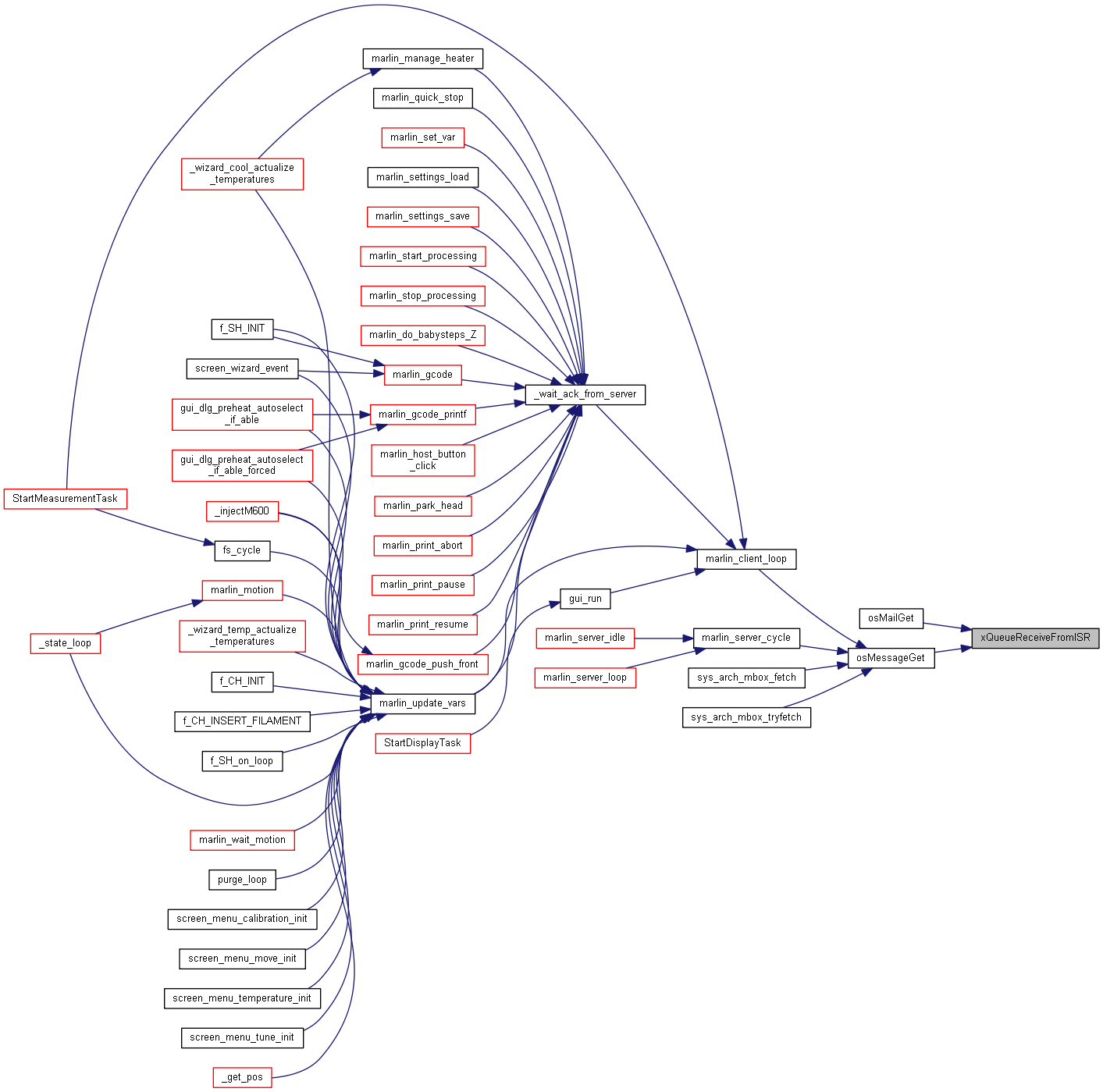
| BaseType_t | xQueueReceiveFromISR (QueueHandle_t xQueue, void *const pvBuffer, BaseType_t *const pxHigherPriorityTaskWoken) |
| |
| BaseType_t | xQueuePeekFromISR (QueueHandle_t xQueue, void *const pvBuffer) |
| |
| UBaseType_t | uxQueueMessagesWaiting (const QueueHandle_t xQueue) |
| |
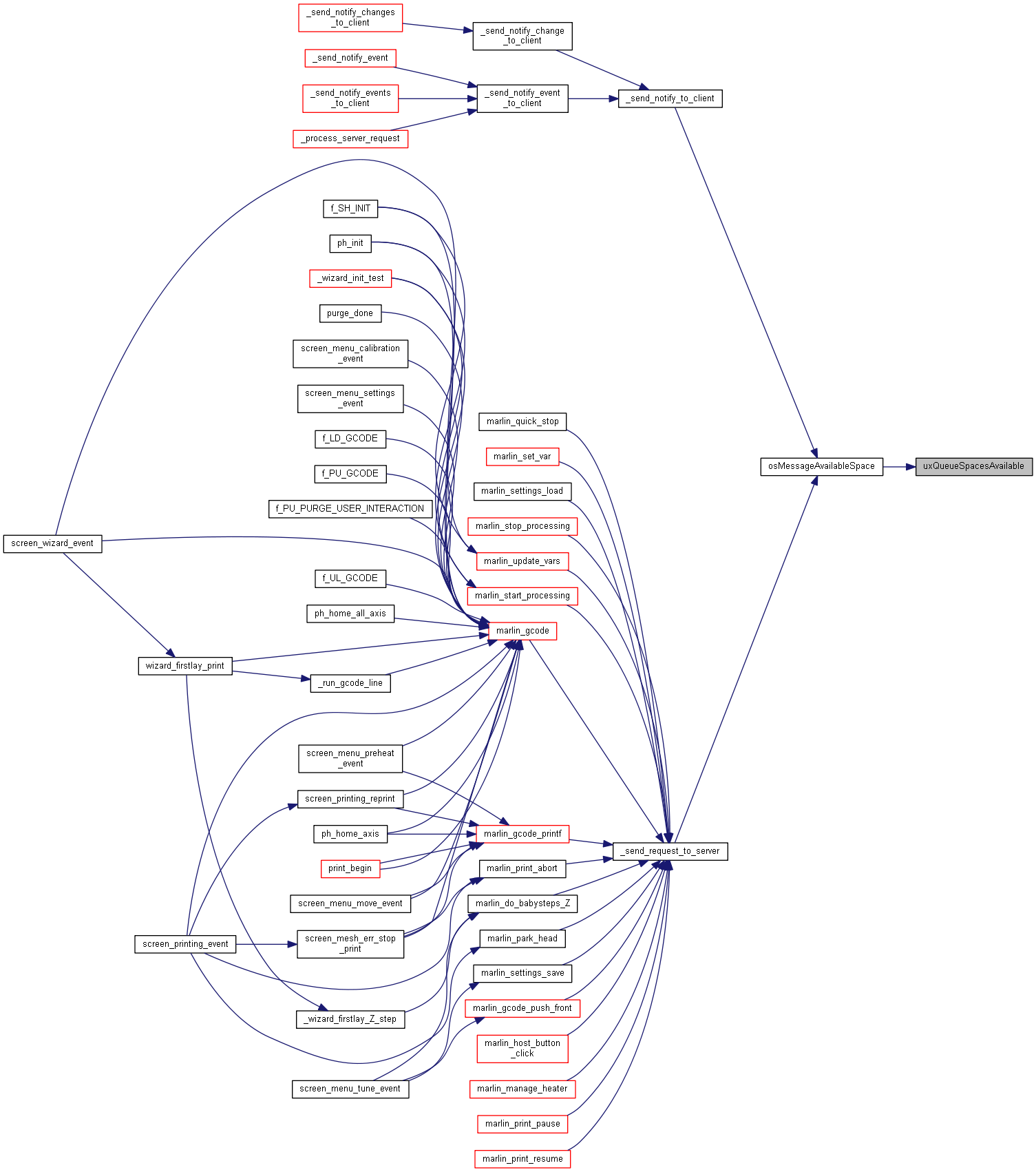
| UBaseType_t | uxQueueSpacesAvailable (const QueueHandle_t xQueue) |
| |
| UBaseType_t | uxQueueMessagesWaitingFromISR (const QueueHandle_t xQueue) |
| |
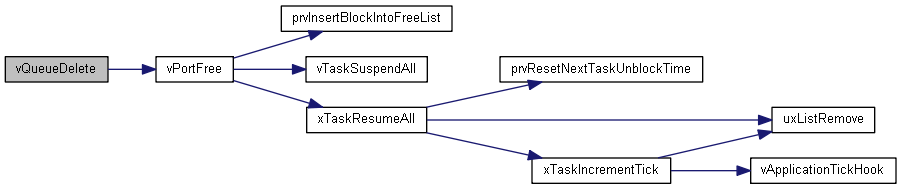
| void | vQueueDelete (QueueHandle_t xQueue) |
| |
| BaseType_t | xQueueIsQueueEmptyFromISR (const QueueHandle_t xQueue) |
| |
| BaseType_t | xQueueIsQueueFullFromISR (const QueueHandle_t xQueue) |
| |
◆ MPU_WRAPPERS_INCLUDED_FROM_API_FILE
| #define MPU_WRAPPERS_INCLUDED_FROM_API_FILE |
◆ queueUNLOCKED
| #define queueUNLOCKED ( ( int8_t ) -1 ) |
◆ queueLOCKED_UNMODIFIED
| #define queueLOCKED_UNMODIFIED ( ( int8_t ) 0 ) |
◆ pxMutexHolder
| #define pxMutexHolder pcTail |
◆ uxQueueType
| #define uxQueueType pcHead |
◆ queueQUEUE_IS_MUTEX
| #define queueQUEUE_IS_MUTEX NULL |
◆ queueSEMAPHORE_QUEUE_ITEM_LENGTH
| #define queueSEMAPHORE_QUEUE_ITEM_LENGTH ( ( UBaseType_t ) 0 ) |
◆ queueMUTEX_GIVE_BLOCK_TIME
| #define queueMUTEX_GIVE_BLOCK_TIME ( ( TickType_t ) 0U ) |
◆ queueYIELD_IF_USING_PREEMPTION
| #define queueYIELD_IF_USING_PREEMPTION |
( |
| ) |
|
◆ prvLockQueue
| #define prvLockQueue |
( |
|
pxQueue | ) |
|
Value:
{ \
{ \
} \
{ \
} \
} \
taskEXIT_CRITICAL()
◆ xQUEUE
◆ Queue_t
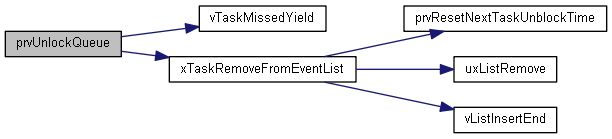
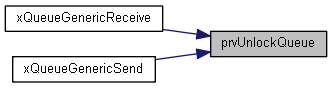
◆ prvUnlockQueue()
1804 int8_t cTxLock = pxQueue->
cTxLock;
1811 #if ( configUSE_QUEUE_SETS == 1 )
1813 if( pxQueue->pxQueueSetContainer !=
NULL )
1885 int8_t cRxLock = pxQueue->
cRxLock;
◆ prvIsQueueEmpty()
◆ prvIsQueueFull()
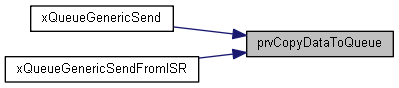
◆ prvCopyDataToQueue()
1708 #if ( configUSE_MUTEXES == 1 )
1714 pxQueue->pxMutexHolder =
NULL;
1757 --uxMessagesWaiting;
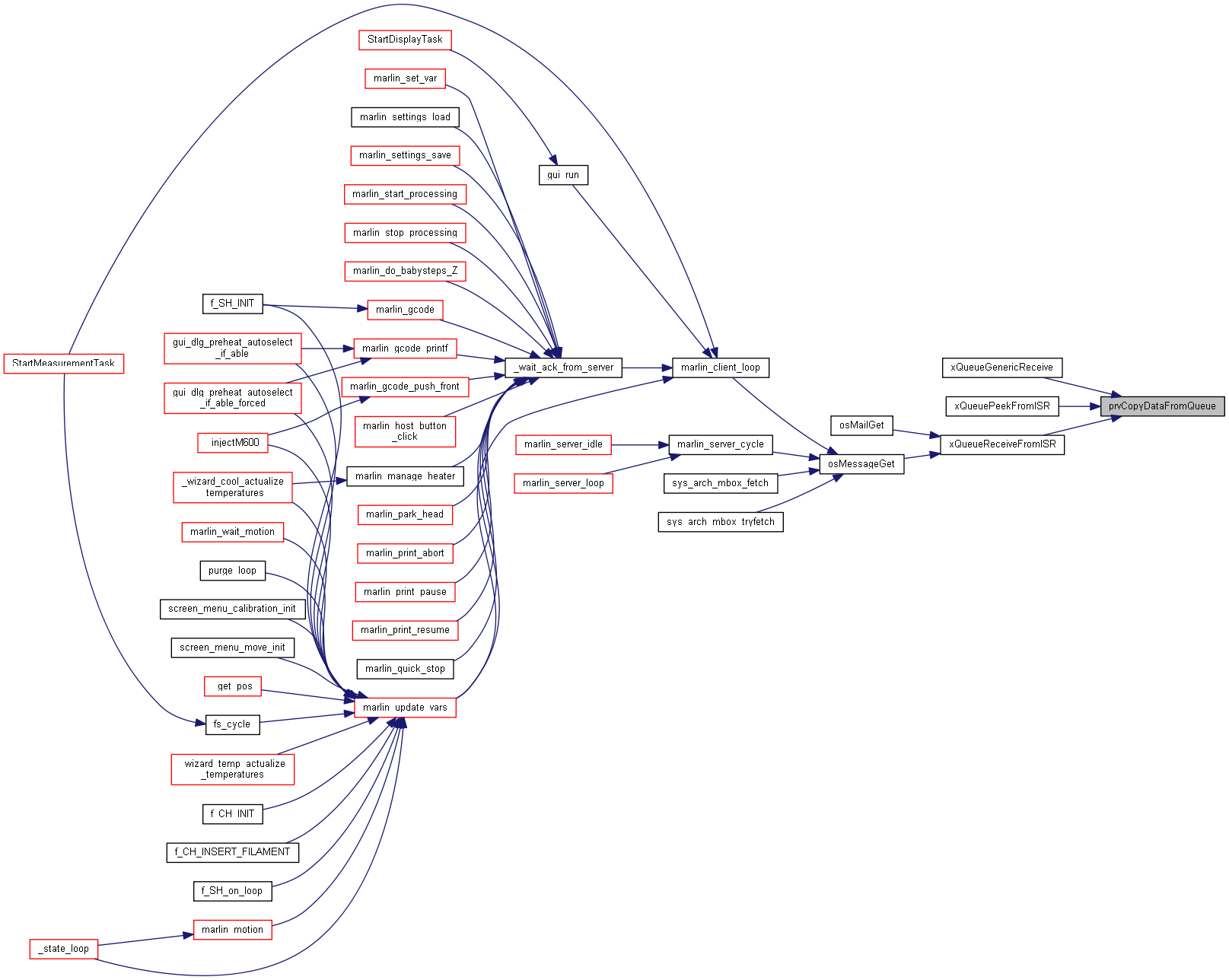
◆ prvCopyDataFromQueue()
◆ prvInitialiseNewQueue()
436 (
void ) ucQueueType;
444 pxNewQueue->
pcHead = ( int8_t * ) pxNewQueue;
449 pxNewQueue->
pcHead = ( int8_t * ) pucQueueStorage;
454 pxNewQueue->
uxLength = uxQueueLength;
458 #if ( configUSE_TRACE_FACILITY == 1 )
460 pxNewQueue->ucQueueType = ucQueueType;
464 #if( configUSE_QUEUE_SETS == 1 )
466 pxNewQueue->pxQueueSetContainer =
NULL;
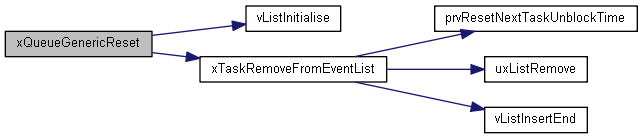
◆ xQueueGenericReset()
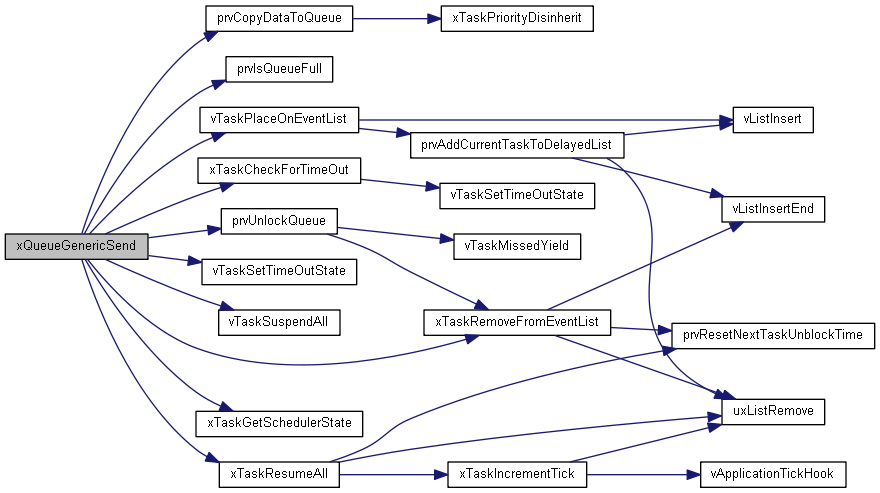
◆ xQueueGenericSend()
732 #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
755 #if ( configUSE_QUEUE_SETS == 1 )
757 if( pxQueue->pxQueueSetContainer !=
NULL )
759 if( prvNotifyQueueSetContainer( pxQueue, xCopyPosition ) !=
pdFALSE )
790 else if( xYieldRequired !=
pdFALSE )
823 else if( xYieldRequired !=
pdFALSE )
854 else if( xEntryTimeSet ==
pdFALSE )
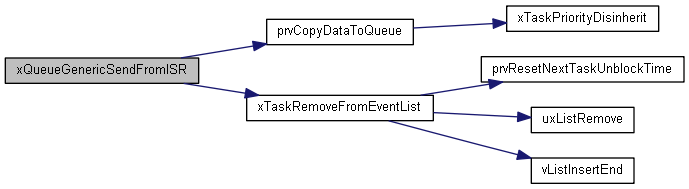
◆ xQueueGenericSendFromISR()
956 const int8_t cTxLock = pxQueue->
cTxLock;
971 #if ( configUSE_QUEUE_SETS == 1 )
973 if( pxQueue->pxQueueSetContainer !=
NULL )
975 if( prvNotifyQueueSetContainer( pxQueue, xCopyPosition ) !=
pdFALSE )
980 if( pxHigherPriorityTaskWoken !=
NULL )
982 *pxHigherPriorityTaskWoken =
pdTRUE;
1002 if( pxHigherPriorityTaskWoken !=
NULL )
1004 *pxHigherPriorityTaskWoken =
pdTRUE;
1030 if( pxHigherPriorityTaskWoken !=
NULL )
1032 *pxHigherPriorityTaskWoken =
pdTRUE;
1055 pxQueue->
cTxLock = ( int8_t ) ( cTxLock + 1 );
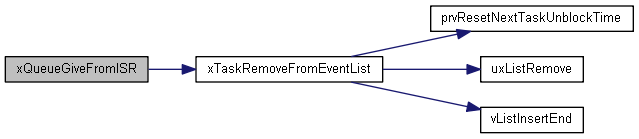
◆ xQueueGiveFromISR()
1118 if( uxMessagesWaiting < pxQueue->uxLength )
1120 const int8_t cTxLock = pxQueue->
cTxLock;
1136 #if ( configUSE_QUEUE_SETS == 1 )
1138 if( pxQueue->pxQueueSetContainer !=
NULL )
1145 if( pxHigherPriorityTaskWoken !=
NULL )
1147 *pxHigherPriorityTaskWoken =
pdTRUE;
1167 if( pxHigherPriorityTaskWoken !=
NULL )
1169 *pxHigherPriorityTaskWoken =
pdTRUE;
1195 if( pxHigherPriorityTaskWoken !=
NULL )
1197 *pxHigherPriorityTaskWoken =
pdTRUE;
1220 pxQueue->
cTxLock = ( int8_t ) ( cTxLock + 1 );
◆ xQueueGenericReceive()
1241 int8_t *pcOriginalReadPosition;
1246 #if ( ( INCLUDE_xTaskGetSchedulerState == 1 ) || ( configUSE_TIMERS == 1 ) )
1279 #if ( configUSE_MUTEXES == 1 )
1351 else if( xEntryTimeSet ==
pdFALSE )
1380 #if ( configUSE_MUTEXES == 1 )
◆ xQueueReceiveFromISR()
1466 const int8_t cRxLock = pxQueue->
cRxLock;
1485 if( pxHigherPriorityTaskWoken !=
NULL )
1487 *pxHigherPriorityTaskWoken =
pdTRUE;
1508 pxQueue->
cRxLock = ( int8_t ) ( cRxLock + 1 );
◆ xQueuePeekFromISR()
1529 int8_t *pcOriginalReadPosition;
◆ uxQueueMessagesWaiting()
1587 uxReturn = ( (
Queue_t * ) xQueue )->uxMessagesWaiting;
◆ uxQueueSpacesAvailable()
1600 pxQueue = (
Queue_t * ) xQueue;
◆ uxQueueMessagesWaitingFromISR()
1619 uxReturn = ( (
Queue_t * ) xQueue )->uxMessagesWaiting;
◆ vQueueDelete()
1632 #if ( configQUEUE_REGISTRY_SIZE > 0 )
1638 #if( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 0 ) )
1644 #elif( ( configSUPPORT_DYNAMIC_ALLOCATION == 1 ) && ( configSUPPORT_STATIC_ALLOCATION == 1 ) )
◆ xQueueIsQueueEmptyFromISR()
◆ xQueueIsQueueFullFromISR()
1979 if( ( (
Queue_t * ) xQueue )->uxMessagesWaiting == ( (
Queue_t * ) xQueue )->uxLength )
#define vQueueUnregisterQueue(xQueue)
Definition: FreeRTOS.h:325
static PRIVILEGED_FUNCTION void prvCopyDataFromQueue(Queue_t *const pxQueue, void *const pvBuffer)
Definition: queue.c:1776
#define traceQUEUE_RECEIVE_FROM_ISR_FAILED(pxQueue)
Definition: FreeRTOS.h:498
#define errQUEUE_FULL
Definition: projdefs.h:92
List_t xTasksWaitingToReceive
Definition: queue.c:143
#define queueOVERWRITE
Definition: queue.h:107
#define portSET_INTERRUPT_MASK_FROM_ISR()
Definition: FreeRTOS.h:300
PRIVILEGED_FUNCTION BaseType_t xTaskGetSchedulerState(void)
#define configASSERT(x)
Definition: FreeRTOSConfig.h:162
UBaseType_t uxItemSize
Definition: queue.c:147
PRIVILEGED_FUNCTION BaseType_t xTaskPriorityDisinherit(TaskHandle_t const pxMutexHolder)
#define queueYIELD_IF_USING_PREEMPTION()
Definition: queue.c:120
int8_t * pcReadFrom
Definition: queue.c:138
#define pdFAIL
Definition: projdefs.h:90
PRIVILEGED_FUNCTION void vTaskPriorityInherit(TaskHandle_t const pxMutexHolder)
volatile int8_t cTxLock
Definition: queue.c:150
#define traceQUEUE_RECEIVE(pxQueue)
Definition: FreeRTOS.h:470
#define queueLOCKED_UNMODIFIED
Definition: queue.c:95
PRIVILEGED_FUNCTION void vTaskMissedYield(void)
Definition: tasks.c:3076
PRIVILEGED_FUNCTION void vListInitialise(List_t *const pxList)
Definition: list.c:79
int8_t * pcWriteTo
Definition: queue.c:134
List_t xTasksWaitingToSend
Definition: queue.c:142
static PRIVILEGED_FUNCTION BaseType_t prvIsQueueFull(const Queue_t *pxQueue)
Definition: queue.c:1953
#define NULL
Definition: usbd_def.h:53
BaseType_t xQueueGenericReset(QueueHandle_t xQueue, BaseType_t xNewQueue)
Definition: queue.c:279
#define pdPASS
Definition: projdefs.h:89
uint32_t TickType_t
Definition: portmacro.h:105
#define queueUNLOCKED
Definition: queue.c:94
#define traceQUEUE_SEND_FROM_ISR_FAILED(pxQueue)
Definition: FreeRTOS.h:490
#define traceQUEUE_PEEK_FROM_ISR(pxQueue)
Definition: FreeRTOS.h:478
#define traceQUEUE_SEND_FAILED(pxQueue)
Definition: FreeRTOS.h:466
PRIVILEGED_FUNCTION BaseType_t xTaskRemoveFromEventList(const List_t *const pxEventList)
Definition: tasks.c:2894
#define taskENTER_CRITICAL()
Definition: task.h:217
PRIVILEGED_FUNCTION void vTaskPlaceOnEventList(List_t *const pxEventList, const TickType_t xTicksToWait)
Definition: tasks.c:2820
PRIVILEGED_FUNCTION void * pvTaskIncrementMutexHeldCount(void)
#define pdFALSE
Definition: projdefs.h:86
unsigned long UBaseType_t
Definition: portmacro.h:99
union QueueDefinition::@57 u
#define prvLockQueue(pxQueue)
Definition: queue.c:264
#define traceQUEUE_PEEK(pxQueue)
Definition: FreeRTOS.h:474
void
Definition: png.h:1083
#define traceQUEUE_PEEK_FROM_ISR_FAILED(pxQueue)
Definition: FreeRTOS.h:502
volatile int8_t cRxLock
Definition: queue.c:149
#define traceBLOCKING_ON_QUEUE_SEND(pxQueue)
Definition: FreeRTOS.h:404
static PRIVILEGED_FUNCTION BaseType_t prvIsQueueEmpty(const Queue_t *pxQueue)
Definition: queue.c:1914
#define listLIST_IS_EMPTY(pxList)
Definition: list.h:291
#define traceQUEUE_RECEIVE_FROM_ISR(pxQueue)
Definition: FreeRTOS.h:494
#define taskSCHEDULER_SUSPENDED
Definition: task.h:257
const uint8_t[]
Definition: 404_html.c:3
static PRIVILEGED_FUNCTION void prvUnlockQueue(Queue_t *const pxQueue)
Definition: queue.c:1794
#define traceQUEUE_SEND_FROM_ISR(pxQueue)
Definition: FreeRTOS.h:486
#define errQUEUE_EMPTY
Definition: projdefs.h:91
volatile UBaseType_t uxMessagesWaiting
Definition: queue.c:145
#define queueSEND_TO_BACK
Definition: queue.h:105
#define portASSERT_IF_INTERRUPT_PRIORITY_INVALID()
Definition: FreeRTOS.h:740
#define traceBLOCKING_ON_QUEUE_RECEIVE(pxQueue)
Definition: FreeRTOS.h:396
UBaseType_t uxLength
Definition: queue.c:146
#define portYIELD_WITHIN_API
Definition: FreeRTOS.h:692
#define traceQUEUE_SEND(pxQueue)
Definition: FreeRTOS.h:462
long BaseType_t
Definition: portmacro.h:98
#define pdTRUE
Definition: projdefs.h:87
int8_t * pcHead
Definition: queue.c:132
PRIVILEGED_FUNCTION BaseType_t xTaskResumeAll(void)
Definition: tasks.c:2017
#define traceQUEUE_RECEIVE_FAILED(pxQueue)
Definition: FreeRTOS.h:482
PRIVILEGED_FUNCTION void vPortFree(void *pv)
Definition: heap_4.c:305
#define traceQUEUE_DELETE(pxQueue)
Definition: FreeRTOS.h:506
#define taskEXIT_CRITICAL()
Definition: task.h:232
#define portCLEAR_INTERRUPT_MASK_FROM_ISR(uxSavedStatusValue)
Definition: FreeRTOS.h:304
#define traceQUEUE_CREATE(pxNewQueue)
Definition: FreeRTOS.h:422
int8_t * pcTail
Definition: queue.c:133
PRIVILEGED_FUNCTION void vTaskSuspendAll(void)
Definition: tasks.c:1944
PRIVILEGED_FUNCTION BaseType_t xTaskCheckForTimeOut(TimeOut_t *const pxTimeOut, TickType_t *const pxTicksToWait)
Definition: tasks.c:3015
static PRIVILEGED_FUNCTION BaseType_t prvCopyDataToQueue(Queue_t *const pxQueue, const void *pvItemToQueue, const BaseType_t xPosition)
Definition: queue.c:1697
#define queueQUEUE_IS_MUTEX
Definition: queue.c:110
#define mtCOVERAGE_TEST_MARKER()
Definition: FreeRTOS.h:748
PRIVILEGED_FUNCTION void vTaskSetTimeOutState(TimeOut_t *const pxTimeOut)
Definition: tasks.c:3007









 1.8.16
1.8.16 
